最近在做一个水岸线检测的程序,根据原图以及翻转图的特征点匹配并通过公式计算水岸线位置。
但在做特征点匹配时一直出错,出错如下图,有没有大佬提供一下解决方法?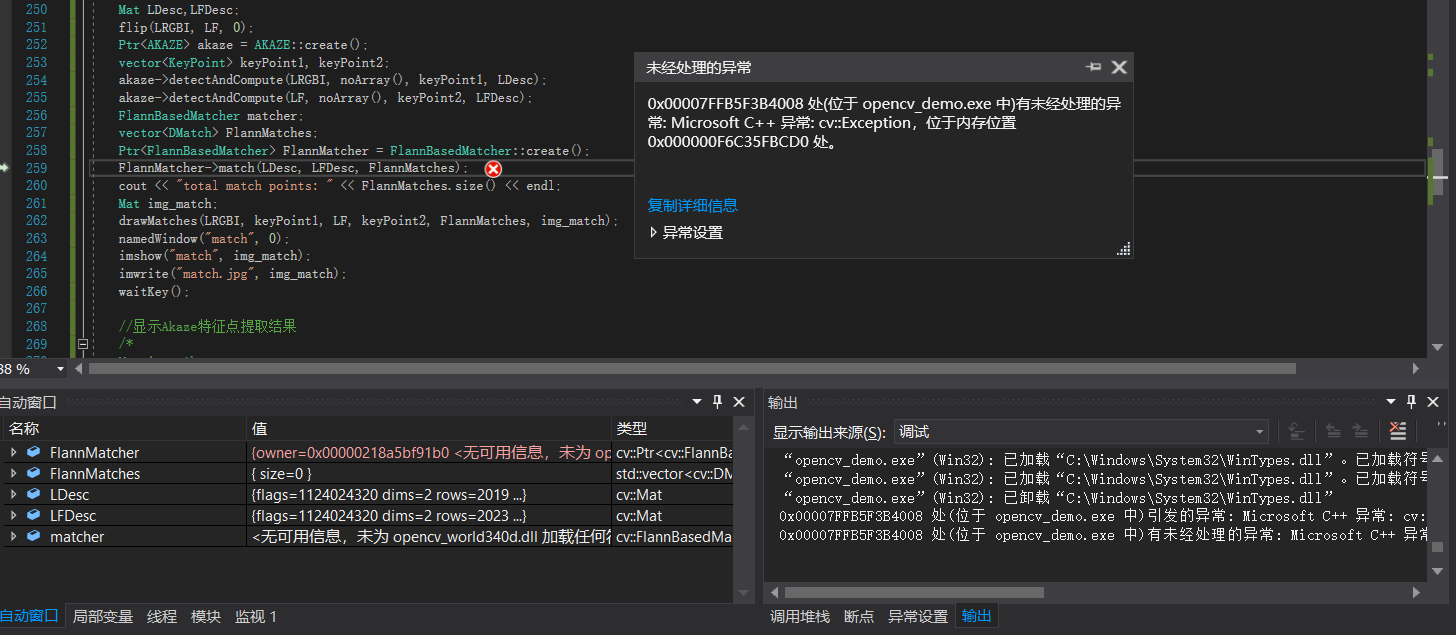

FlannBasedMatcher 特征点快速匹配出错

- 写回答
- 好问题 0 提建议
- 追加酬金
- 关注问题
 分享
分享- 邀请回答
-


4条回答 默认 最新
 白色一大坨 2018-04-26 04:13关注
白色一大坨 2018-04-26 04:13关注实在运行不起来,之前的ptr列表都没有,很多变量也没做声明,您这么问还是另请高明,我是解决不了
本回答被题主选为最佳回答 , 对您是否有帮助呢?解决 无用评论 打赏举报 分享
- 2018-04-25 08:25回答 4 已采纳 实在运行不起来,之前的ptr列表都没有,很多变量也没做声明,您这么问还是另请高明,我是解决不了
- 2019-05-26 18:57回答 1 已采纳 你运行的时候有没有带上参数,并且这个参数应该是你的文件夹的路径
- 2022-07-22 14:06qq_1624543793的博客 使用SIFT进行关键点提取是一种非常方便快速无需训练的特征点提取方式,提取的关键点可以用来进行图像对之间的关联进而计算两幅图像间单应性变换矩阵,进而进行图像匹配与融合。
- 2022-09-01 16:13_leoatliang的博客 OpenCV图像处理第十二部分:特征检测与...主要内容包含:特征检测(Harris角点检测、Shi-Tomasi角点检测、SIFT关键点检测、SURF特征检测和ORB特征检测)、特征匹配(暴力特征匹配、FLANN特征匹配)以及图像查找。......
- 2019-04-24 00:32玉树银花冬飞雪的博客 在采用surf+knnmatch进行特征匹配的时候,参考了如下这篇博客的代码, https://www.cnblogs.com/skyfsm/p/7401523.html #include "highgui/highgui.hpp" #include "opencv2/nonfree/nonfree.hpp" #include "opencv...
- 2018-04-03 17:41BruvinLu的博客 一、使用surf算法实现1、绘制关键点函数void drawKeyPoints(const Mat &image,const vector<KeyPoint>&keypoints,Mat &outImage,const Scalar &color=Scalar::all(-1...
- 2020-10-26 16:20没得感情的吃货的博客 Opencv特征点检测及目标提取前言1. 特征点检测方法简介2. 单张图片特征点检测3. opencv批量处理图片模板4. 多张图片特征点检测及目标提取总结 前言 在图像预处理时,会出现背景复杂,而我们需要提取出需要的部分,...
- 2020-03-16 14:57quankangquan的博客 计算多个二维点对之间的最优单映射变换矩阵H(3行x3列)(就是对图片的矫正),使用最小均方误差或者RANSAC方法 函数功能:找到两个平面之间的转换矩阵。 这里涉及到映射变换的知识, 下面介绍下什么是...
- 2017-06-09 16:16蕭xxz的博客 使用匹配寻找已知物体位置,并用方框标识出来。
- 2019-01-31 20:55xuwentao!!的博客 printf("\n符合条件的匹配点[%d],特征点1:%d,特征点2:%d\n",i,good_matches[i].queryIdx,good_matches[i].trainIdx); } //绘制匹配图 Mat imgMatches; drawMatches(srcImg1,keypoint1,srcImg2,keypoint2,...
- 2018-12-18 09:52qq_37894023的博客 【特征点的检测与匹配】是计算机视觉中非常重要的技术之一。在物体检测、视觉跟踪、三维重建等领域都有很广泛的应用。 opencv提供了10种特征检测方法: 【FAST】 【STAR】 【SIFT】【SURF】【ORB】 【MSER】 【GFTT...
- 2020-08-06 19:26自学AI的鲨鱼儿的博客 2、Opencv中特征点提取和特征匹配算法详解(ORB SIFT SURF FAST) 参考: 理论: Opencv中特征点提取和特征匹配算法详解(ORB SIFT SURF FAST) 特征检测和特征匹配方法 代码: OpenCV中的特征检测之特征匹配代码 三...
- 2018-10-19 19:46知识在于分享的博客 就是说世界坐标系下的同一个点在两幅图像上的映射,已知左图映射点p1,那么右图映射点p2一定在相对于p1的极线上,这样可以减少待匹配的点数量。 对于极线约束方程可以由以下来表示: 三维向量x和x'存放相关点...
- 2020-12-09 05:30weixin_39691233的博客 角点特征常常是图像中独特的存在,比如你在玩拼图游戏时,首先肯定会去找一些独一无二的匹配项,比如人像的眼睛,嘴巴,这些特征你很容易判断哪些碎片应该拼凑在一起,而相比之下,那些比较常见的特征你需要最后多次...
- 2020-03-08 11:44今天狗善结婚了吗的博客 这种描述具有尺度不变性,可在图像中检测出关键点,是一种局部特征描述子。 1.1算法介绍 SIFT特征是基于物体上的一些局部外观的兴趣点而与影像的大小和旋转无关。对于光线、噪声、微视角改变的容忍度也相当高。基于...
- 2020-12-03 14:28weixin_39785081的博客 现在,我需要匹配这些描述符,因此我决定使用Flann Matcher.flann_params = dict(algorithm = FLANN_INDEX_KDTREE,trees = 4)matcher = cv2.FlannBasedMatcher(flann_params, {})但是当我尝试将knn...
- 2017-06-10 17:27蕭xxz的博客 单应性变换后匹配
- 2022-09-01 11:55逸步行天下的博客 特征提取图像,一般是获取到图像的特征角点集合(通过具体的方法函数获得FAST或者SIFT或者ORB特征角点集合),相邻帧匹配到的特征位置的差作为MV,特征差也就是运动矢量,反映后面的帧在前一帧上面的运动趋势。...
- 2023-09-14 20:26小罗裙的博客 使用SIFT算法检测到的特征点比较全面,但是对于相似度高的特征点匹配效果不好,容易出错,通过改变匹配对儿之间的阈值大小可以改变匹配特征点的数量,阈值越小,特征点数量越少,匹配的效果越好,越准确。...
- 2023-05-09 18:20summer_524的博客 图像拼接是计算机视觉中的重要分支,它是将两幅以上的具有部分重叠的图像进行拼接从而得到...针对叠加后的图像,采用APAP之类的算法,对齐特征点5.通过图割方法,自动选取拼接缝6.根据multi-band blending策略实现融合。
- 没有解决我的问题, 去提问


悬赏问题
- ¥15 python的qt5界面
- ¥15 无线电能传输系统MATLAB仿真问题
- ¥50 如何用脚本实现输入法的热键设置
- ¥20 我想使用一些网络协议或者部分协议也行,主要想实现类似于traceroute的一定步长内的路由拓扑功能
- ¥30 深度学习,前后端连接
- ¥15 孟德尔随机化结果不一致
- ¥15 apm2.8飞控罗盘bad health,加速度计校准失败
- ¥15 求解O-S方程的特征值问题给出边界层布拉休斯平行流的中性曲线
- ¥15 谁有desed数据集呀
- ¥20 手写数字识别运行c仿真时,程序报错错误代码sim211-100