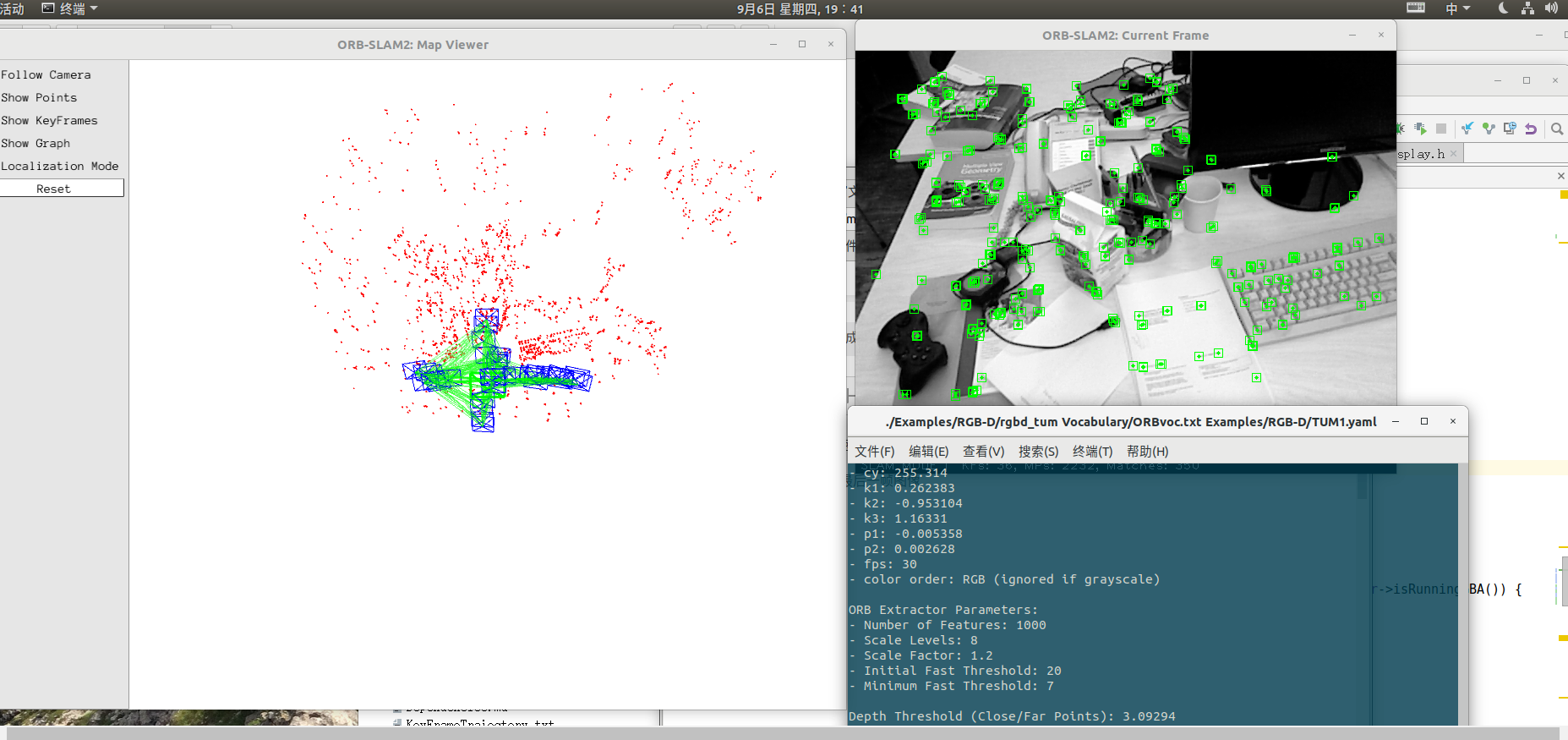
如图所示,这是别人的图片左侧有轨迹画面,我的只有右边的两个窗口,ORB-SLAM2:Map Viewer窗口没有任何画面,并且是卡死的,请问怎么回事?

SLAM ORB-SLAM2:Map Viewer画面不出现任何内容,卡死

- 写回答
- 好问题 0 提建议
- 关注问题
 分享
分享- 邀请回答
-

3条回答 默认 最新
 巴提斯塔 2021-05-26 09:11关注
巴提斯塔 2021-05-26 09:11关注我也碰到了同样的情况,在Pangolin/src/display/device/display_x11.cpp文件中,注释掉123和124这两行,将122行修改为GLX_DOUBLEBUFFER , glx_doublebuffer ? True : False,重新编译Pangolin就显示Map viewer了
评论 打赏解决 7无用举报 分享
- 2022-12-29 22:18APS2023的博客 ORBSLAM2跟踪线程解析
- 2023-05-12 11:02我才是一卓的博客 问题 如图,orb-slam3 运行的时候,Current Frame 窗口正常显示,但是 Map Viewer 窗口黑屏。 排查 检查源码,发现 Current Frame 窗口是 opencv::imshow 的,而 Map Viewer 窗口是 pangolin 库显示的。 检查 ...
- 2023-10-06 15:43独孤西的博客 修改orb-slam2显示前后两帧特征点匹配情况
- 2023-01-04 10:07APS2023的博客 函数作用 为当前关键帧... // 取出所有连接的关键帧,mConnectedKeyFrameWeights的类型为std::map,而vPairs变量将共视的地图点数放在前面,利于排序 for(map::iterator mit=mConnectedKeyFrameWeights.begin(), mend=...
- 2023-06-04 10:19几度春风里的博客 目录 1 整体思路 2 功能实现 3 结果运行 (1) TUM数据集下载 (2) associate.py用于RGB和Depth匹配 (3) 运行数据集 4 CMakeLists.txt文件修改 5 完整PointCloudMapping.h和PointCloudMapping.cc 6 报错分析 7 思考扩展...
- 2020-04-05 15:23DenineLu的博客 在一切准备工作都做好后,运行TUM RGBD的任意一个序列时,发现在视频序列结束时,窗口就会灰屏卡住。通过debug发现是pangolin库的一个函数卡...我们进入SLAM.Shutdown函数,找到出现问题的语句 if(mpViewer){ pan...
- ZARD帧心的博客 在新安装的Ubuntu 20.04系统中配置ORB-SLAM2和ORB-SLAM3的运行环境 Ubuntu系统自带的源都是国外的网址,国内用户在使用的时候下载比较慢甚至无法获取,在安装各种库或软件时会深受其折磨!解决方案是直接替换成国内...
- 2022-02-14 11:073D视觉工坊的博客 点击上方“3D视觉工坊”,选择“星标”干货第一时间送达作者丨小深来源丨深话AI本文总结了特征点法SLAM中目前效果最好的方法:ORB-SLAM2 / ORB-SLAM3 相关改进代码汇总,...
- 2023-07-12 20:44ZPILOTE的博客 本篇目的是用TUM开源数据来运行ORB-SLAM2,并生成轨迹,最后用evo评估工具来评估ORB-SLAM2生成的轨迹和真值轨迹。
- 2020-10-04 18:39惊鸿一博的博客 目录 1.View线程都做了些什么 2.View线程代码 1)View线程创建 2)Run函数代码 ...所以,其实了解View线程做了哪些事情最好的办法就是照着ORB-SLAM2的运行结果来和代码中的Pangolin接口进行对应。 1.Vie
- 没有解决我的问题, 去提问
