最近根据网络上的教程试着用ros调用笔记本电脑的摄像头,运行
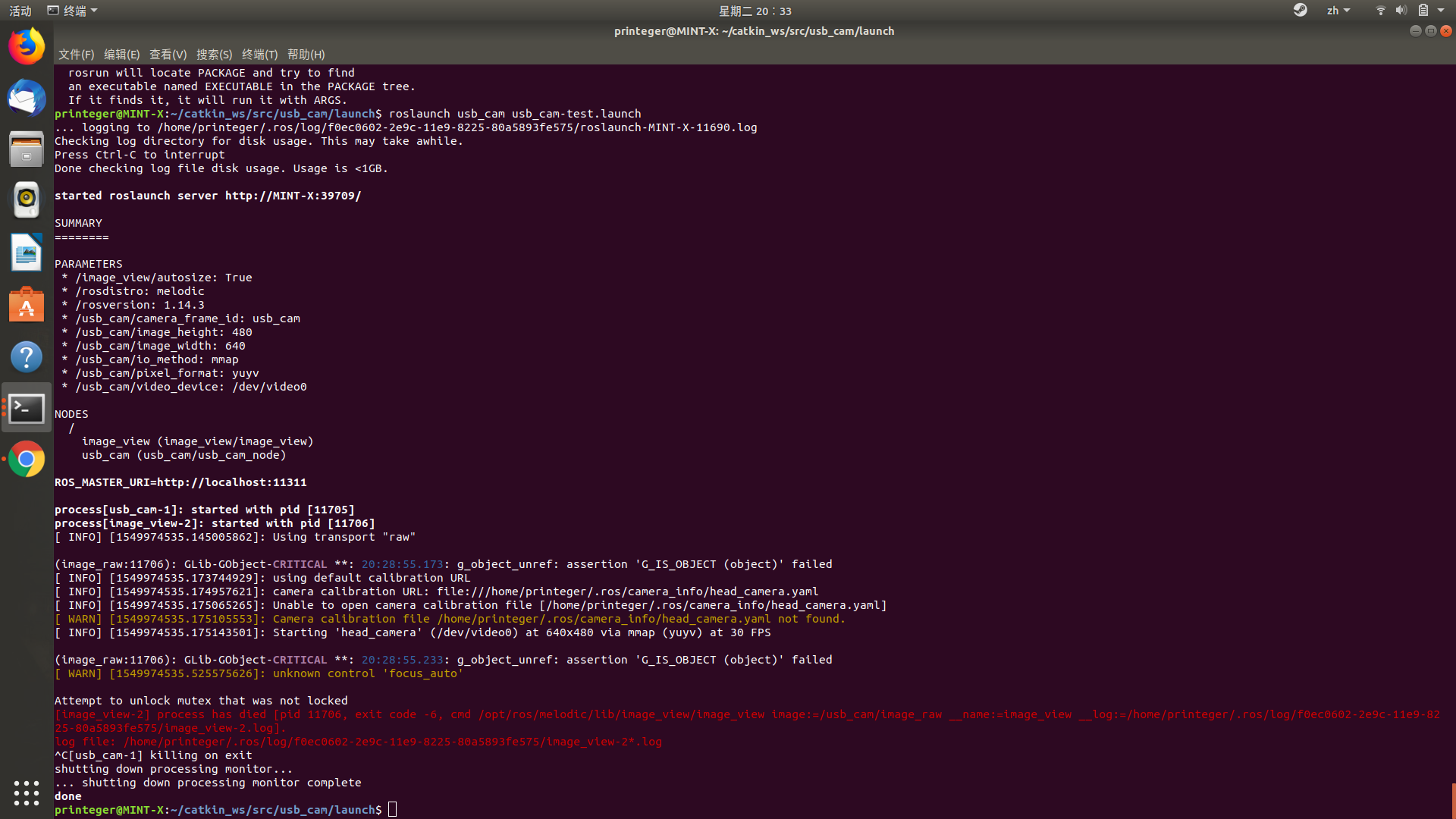
roslaunch usb_cam usb_cam-test.launch
时会弹出一个的image_raw的窗口,笔记本摄像头的启动指示灯也会点亮,但是没有图像。
过一会窗口就自己关闭了。
找了好久也没有遇见有相同问题的,不知道有没有大佬能指点以下。

最近根据网络上的教程试着用ros调用笔记本电脑的摄像头,运行
roslaunch usb_cam usb_cam-test.launch
时会弹出一个的image_raw的窗口,笔记本摄像头的启动指示灯也会点亮,但是没有图像。
过一会窗口就自己关闭了。
找了好久也没有遇见有相同问题的,不知道有没有大佬能指点以下。
 分享
分享 我当时也遇到了这个问题,后来问题被我解决了。我把解决过程卸载了我的博客上,希望对你有所帮助。
https://blog.csdn.net/weixin_43262513/article/details/88073532
分享

