多相机参数标定。VS2015+opencv2.4.13
代码运行到匹配关系那一部分就会崩。虽然找到了问题在哪,但不会解决,求大神指教。报错内容为:0x00007FF8DCE3D3D8 (ucrtbase.dll) (calib_stitch.exe 中)处有未经处理的异常: 将一个无效参数传递给了将无效参数视为严重错误的函数。
下面是代码:
#include
#include
#include
#include "opencv2/core/core.hpp"
#include "opencv2/opencv_modules.hpp"
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/stitching/detail/autocalib.hpp"
#include "opencv2/stitching/detail/blenders.hpp"
#include "opencv2/stitching/detail/camera.hpp"
#include "opencv2/stitching/detail/exposure_compensate.hpp"
#include "opencv2/stitching/detail/matchers.hpp"
#include "opencv2/stitching/detail/motion_estimators.hpp"
#include "opencv2/stitching/detail/seam_finders.hpp"
#include "opencv2/stitching/detail/util.hpp"
#include "opencv2/stitching/detail/warpers.hpp"
#include "opencv2/stitching/warpers.hpp"
#include "opencv2/features2d/features2d.hpp"
#include "opencv2/nonfree/nonfree.hpp"
#include
using namespace std;
using namespace cv;
using namespace cv::detail;
// Default command line args
bool preview = false;
bool try_gpu = false;
double work_megapix = -0.6; // 缩放参数
double seam_megapix = 0.1;
double compose_megapix = -1;
float conf_thresh = 1.f;
string features_type = "sift"; //orb surf sift
string ba_cost_func = "reproj"; //reproj ray
string ba_refine_mask = "xxllx";
bool do_wave_correct = true;
WaveCorrectKind wave_correct = detail::WAVE_CORRECT_HORIZ;
bool save_graph = true;
std::string save_graph_to;
string warp_type = "spherical"; //spherical cylindrical plane
int expos_comp_type = ExposureCompensator::GAIN_BLOCKS; //GAIN,OR NO
float match_conf = 0.3f;
string seam_find_type = "gc_color"; //no voronoi gc_color gc_colorgrad dp_color dp_colorgrad
int blend_type = Blender::MULTI_BAND; // Blender::FEATHER Blender::MULTI_BAND
float blend_strength = 5;//0就是关,默认5
string result_name = "result.jpg";
void detection(const vector imagelist, vector>& ransac_image_points_seq)
{
if (imagelist.size() % 2 != 0)
{
cout << "Error: the image list contains odd (non-even) number of elements\n";
return;
}
bool displayCorners = true;//true;
const int maxScale = 2;
const float squareSize = 1.f; // Set this to your actual square size
// ARRAY AND VECTOR STORAGE:
Size boardSize = Size(11, 8);
vector<vector<Point2f>> imagePoints[2];
vector<vector<Point3f> > objectPoints;
Size imageSize;
int i, j, k, nimages = (int)imagelist.size() / 2;
imagePoints[0].resize(nimages);
imagePoints[1].resize(nimages);
vector<string> goodImageList;
for (i = j = 0; i < nimages; i++)
{
for (k = 0; k < 2; k++)
{
const string& filename = imagelist[i * 2 + k];
Mat img = imread(filename, 0);
if (img.empty())
break;
if (imageSize == Size())
imageSize = img.size();
else if (img.size() != imageSize)
{
cout << "The image " << filename << " has the size different from the first image size. Skipping the pair\n";
break;
}
bool found = false;
vector<Point2f>& corners = imagePoints[k][j];
for (int scale = 1; scale <= maxScale; scale++)
{
Mat timg;
if (scale == 1)
timg = img;
else
resize(img, timg, Size(), scale, scale);
found = findChessboardCorners(timg, boardSize, corners,
CV_CALIB_CB_ADAPTIVE_THRESH | CV_CALIB_CB_NORMALIZE_IMAGE);
if (found)
{
if (scale > 1)
{
Mat cornersMat(corners);
cornersMat *= 1. / scale;
}
break;
}
}
if (displayCorners)
{
//cout << filename << endl;
Mat cimg, cimg1;
cvtColor(img, cimg, COLOR_GRAY2BGR);
drawChessboardCorners(cimg, boardSize, corners, found);
double sf = 640. / MAX(img.rows, img.cols);
resize(cimg, cimg1, Size(), sf, sf);
namedWindow("corners", 0);
imshow("corners", cimg1);
char c = (char)waitKey(1);
if (c == 27 || c == 'q' || c == 'Q') //Allow ESC to quit
exit(-1);
}
else
putchar('.');
if (!found)
break;
cornerSubPix(img, corners, Size(11, 11), Size(-1, -1), TermCriteria(CV_TERMCRIT_ITER + CV_TERMCRIT_EPS, 30, 0.01));
/* 亚像素精确化 */
//find4QuadCornerSubpix(img, corners, Size(5, 5)); //对粗提取的角点进行精确化
}
if (k == 2)
{
goodImageList.push_back(imagelist[i * 2]);
goodImageList.push_back(imagelist[i * 2 + 1]);
j++;
}
}
cout << j << " pairs have been successfully detected.\n";
nimages = j;
if (nimages < 2)
{
cout << "Error: too little pairs to run the calibration\n";
return;
}
imagePoints[0].resize(nimages);
imagePoints[1].resize(nimages);
vector<vector<Point2f>> image_points_seq;
for (int i = 0; i < 2; i++)
{
vector<Point2f> buf;
for (int j = 0; j < imagePoints[i].size(); j++)
{
for (int k = 0; k < imagePoints[i][j].size(); k++)
{
buf.push_back(imagePoints[i][j][k]);
}
}
image_points_seq.push_back(buf);
}
//RANSAC
cout << image_points_seq[0].size() << endl;
cout << image_points_seq[1].size() << endl;
vector<uchar> mask;
Mat h = findHomography(image_points_seq[0], image_points_seq[1], mask, CV_FM_RANSAC);
vector<Point2f> point1, point2;
for (int i = 0; i < image_points_seq[0].size(); i++)
{
//if (mask[i] == 1)
{
point1.push_back(image_points_seq[0][i]);
point2.push_back(image_points_seq[1][i]);
}
}
ransac_image_points_seq.push_back(point1);
ransac_image_points_seq.push_back(point2);
//cout << imagePoints[0].size() << endl;
//cout << imagePoints[1].size() << endl;
//return imagePoints;
}
int main(int argc, char* argv[])
{
int64 app_start_time = getTickCount();
string xml_name = "144-146-147-1481.yaml";
vector<vector<string>> img_names;
vector<vector<string>> names;
char file_name[256];
int num_pairs = 3;
int nums_pairs_count[4] = { 23,23,20 };
for (int i =0; i <= num_pairs; i++)
{
vector<string> temp;
for (int j = 1; j <= nums_pairs_count[i]; j++)
{
sprintf(file_name, "1234/%d/1/(%d).jpg", i, j);
temp.push_back(file_name);
sprintf(file_name, "1234/%d/2/(%d).jpg", i, j);
temp.push_back(file_name);
}
names.push_back(temp);
}
//棋盘格检测
vector<vector<Point2f>> double_image_points_seq;
int match_num[4][4] = {0};
int match_start[4][4][2] = {0};
//vector<vector<Point2f>> ransac_image_points_seq;
//detection(names[0], ransac_image_points_seq);
//match_num[0][1] = ransac_image_points_seq[0].size();
//match_num[1][0] = ransac_image_points_seq[0].size();
//match_start[0][1] = 0;
//match_start[1][0] = 0;
//match_num.push_back(ransac_image_points_seq[0].size());
//cout << ransac_image_points_seq[0].size() << endl;
//cout << ransac_image_points_seq[1].size() << endl;
for (int i = 0; i < num_pairs; i++)
{
vector<vector<Point2f>> ransac_image_points_seq;
detection(names[i], ransac_image_points_seq);
if (i != 0)
{
match_num[i][i + 1] = ransac_image_points_seq[0].size();
match_num[i+1][i] = ransac_image_points_seq[0].size();
match_start[i][i + 1][0] = match_num[i - 1][i];
match_start[i][i + 1][1] = 0;
match_start[i+1][i][0] = 0;
match_start[i+1][i][1] = match_num[i - 1][i];
for (int j = 0; j < ransac_image_points_seq[0].size(); j++)
{
double_image_points_seq[double_image_points_seq.size() - 1].push_back(ransac_image_points_seq[0][j]);
}
double_image_points_seq.push_back(ransac_image_points_seq[1]);
}
else
{
double_image_points_seq.push_back(ransac_image_points_seq[0]);
double_image_points_seq.push_back(ransac_image_points_seq[1]);
match_num[0][1] = ransac_image_points_seq[0].size();
match_num[1][0] = ransac_image_points_seq[0].size();
match_start[0][1][0] = 0;
match_start[0][1][1] = 0;
match_start[1][0][0] = 0;
match_start[1][0][1] = 0;
}
}
//特征点
vector<ImageFeatures> features(num_pairs + 1);
for (int i = 0; i <= num_pairs; i++)
{
vector<KeyPoint> keypoints;
for (int j = 0; j < double_image_points_seq[i].size(); j++)
{
KeyPoint point;
point.pt = double_image_points_seq[i][j];
keypoints.push_back(point);
}
features[i].keypoints = keypoints;
features[i].img_size = Size(2560, 1440);
features[i].img_idx = i;
}
//匹配关系
vector<MatchesInfo> pairwise_matches;
for (int i = 0; i <= num_pairs; i++)
{
for (int j = 0; j <= num_pairs; j++)
{
MatchesInfo matches_info;
if(j==i+1 || j==i-1)
{
vector<DMatch> match(match_num[i][j]);
vector<uchar> mask(match_num[i][j]);
for (int n = 0; n < match_num[i][j]; n++)
{
match[n].queryIdx = match_start[i][j][0] + n;
match[n].trainIdx = match_start[i][j][1] + n;
mask[n] = 1;
}
matches_info.src_img_idx = i;
matches_info.dst_img_idx = j;
matches_info.matches = match;
//info.inliers_mask = inliers_mask;
//info.num_inliers = match_num[i][j];
//vector<Point2f> pts_src, pts_dst;
Mat src_points(1, static_cast<int>(matches_info.matches.size()), CV_32FC2);
Mat dst_points(1, static_cast<int>(matches_info.matches.size()), CV_32FC2);
for (int n = 0; n < match_num[i][j]; n++)
{
const DMatch& m = matches_info.matches[n];
Point2f p = features[i].keypoints[m.queryIdx].pt;
p.x -= features[i].img_size.width * 0.5f;
p.y -= features[i].img_size.height * 0.5f;
src_points.at<Point2f>(0, static_cast<int>(n)) = p;
p = features[j].keypoints[m.trainIdx].pt;
p.x -= features[j].img_size.width * 0.5f;
p.y -= features[j].img_size.height * 0.5f;
dst_points.at<Point2f>(0, static_cast<int>(n)) = p;
//pts_src.push_back(features[i].keypoints[match[n].queryIdx].pt);
//pts_dst.push_back(features[j].keypoints[match[n].trainIdx].pt);
}
//vector<uchar> mask;
matches_info.H = findHomography(src_points, dst_points, matches_info.inliers_mask,CV_FM_RANSAC);
//matches_info.H = h.clone();
matches_info.num_inliers = 0;
for (size_t i = 0; i < matches_info.inliers_mask.size(); ++i)
if (matches_info.inliers_mask[i])
matches_info.num_inliers++;
//info.confidence = 2;
matches_info.confidence = matches_info.num_inliers / (8 + 0.3 * matches_info.matches.size());
// Set zero confidence to remove matches between too close images, as they don't provide
// additional information anyway. The threshold was set experimentally.
matches_info.confidence = matches_info.confidence > 3. ? 0. : matches_info.confidence;
//// Construct point-point correspondences for inliers only
src_points.create(1, matches_info.num_inliers, CV_32FC2);
dst_points.create(1, matches_info.num_inliers, CV_32FC2);
int inlier_idx = 0;
for (size_t n = 0; n < matches_info.matches.size(); ++n)
{
if (!matches_info.inliers_mask[n])
continue;
const DMatch& m = matches_info.matches[n];
Point2f p = features[i].keypoints[m.queryIdx].pt;
p.x -= features[i].img_size.width * 0.5f;
p.y -= features[i].img_size.height * 0.5f;
src_points.at<Point2f>(0, inlier_idx) = p;
p = features[j].keypoints[m.trainIdx].pt;
p.x -= features[j].img_size.width * 0.5f;
p.y -= features[j].img_size.height * 0.5f;
dst_points.at<Point2f>(0, inlier_idx) = p;
inlier_idx++;
}
// Rerun motion estimation on inliers only
matches_info.H = findHomography(src_points, dst_points, CV_RANSAC);
}
else
{
matches_info.src_img_idx = -1;
matches_info.dst_img_idx = -1;
}
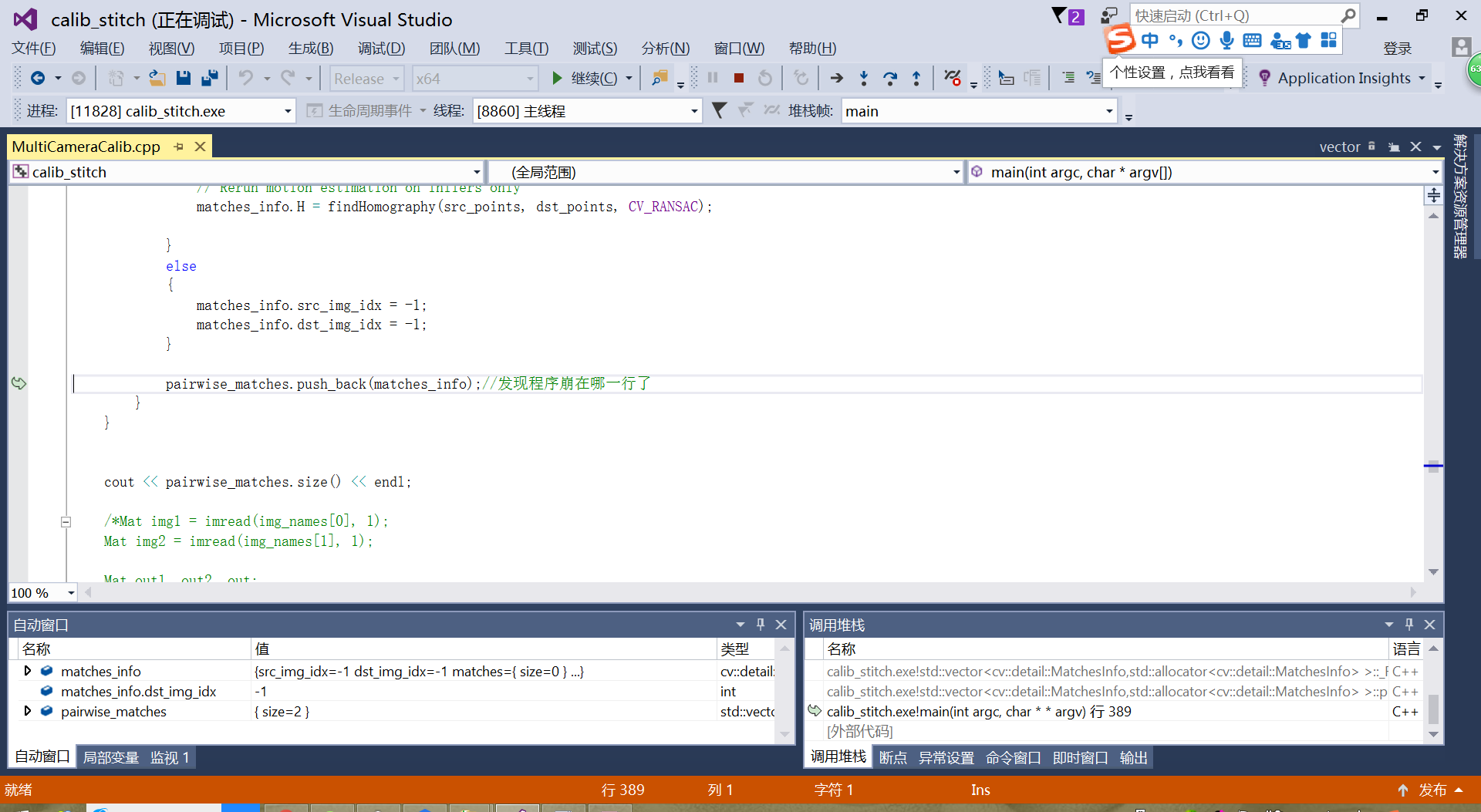
pairwise_matches.push_back(matches_info);//发现程序崩在哪一行了
}
}
cout << pairwise_matches.size() << endl;
/*Mat img1 = imread(img_names[0], 1);
Mat img2 = imread(img_names[1], 1);
Mat out1, out2, out;
drawKeypoints(img1, features[0].keypoints, out1);
drawKeypoints(img1, features[0].keypoints, out2);
drawMatches(img1, features[0].keypoints, img2, features[1].keypoints, pairwise_matches[0].matches, out);
cv::namedWindow("out1", 0);
cv::imshow("out1", out);
cv::namedWindow("out2", 0);
cv::imshow("out2", out);
cv::namedWindow("out", 0);
cv::imshow("out", out);
cv::waitKey();*/
//for(int i=0; i<nu)
HomographyBasedEstimator estimator;
vector<CameraParams> cameras;
estimator(features, pairwise_matches, cameras);
for (size_t i = 0; i < cameras.size(); ++i)
{
Mat R;
cameras[i].R.convertTo(R, CV_32F);
cameras[i].R = R;
//cout << "Initial intrinsics #" << indices[i] + 1 << ":\n" << cameras[i].K() << endl;
}
Mat K1(Matx33d(
1.2755404529239545e+03, 0., 1.3099971348805052e+03, 0.,
1.2737998060528048e+03, 8.0764915313791903e+02, 0., 0., 1.
));
Mat K2(Matx33d(
1.2832823446505638e+03, 0., 1.2250954954648896e+03, 0.,
1.2831721912770793e+03, 7.1743301498758751e+02, 0., 0., 1.
));
Mat K3(Matx33d(
1.2840711959594287e+03, 0., 1.2473666273838244e+03, 0.,
1.2840499404560594e+03, 7.9051574509733359e+02, 0., 0., 1.));
Mat K4(Matx33d(
1.2865853945042952e+03, 0., 1.1876049192856492e+03, 0.,
1.2869927339670007e+03, 6.2306976561458930e+02, 0., 0., 1.
));
Mat K[4];
K[0] = K1.clone();
K[1] = K2.clone();
K[2] = K3.clone();
K[3] = K4.clone();
for (size_t i = 0; i < cameras.size(); ++i)
{
K[i].convertTo(K[i], CV_32F);
}
for (size_t i = 0; i < cameras.size(); ++i)
{
Mat R;
cameras[i].R.convertTo(R, CV_32F);
cameras[i].R = R;
cameras[i].focal = 0.5*(K[i].at<float>(0, 0)+ K[i].at<float>(1, 1)); // Focal length
cameras[i].ppx = K[i].at<float>(0,2); // Principal point X
cameras[i].ppy = K[i].at<float>(1,2); ; // Principal point Y
cout << cameras[i].K() << endl;
//cout << "Initial intrinsics #" << indices[i] + 1 << ":\n" << cameras[i].K() << endl;
}
Ptr<detail::BundleAdjusterBase> adjuster;
if (ba_cost_func == "reproj") adjuster = new detail::BundleAdjusterReproj();
else if (ba_cost_func == "ray") adjuster = new detail::BundleAdjusterRay();
else
{
cout << "Unknown bundle adjustment cost function: '" << ba_cost_func << "'.\n";
return -1;
}
adjuster->setConfThresh(conf_thresh);
Mat_<uchar> refine_mask = Mat::zeros(3, 3, CV_8U);
if (ba_refine_mask[0] == 'x') refine_mask(0, 0) = 1;
if (ba_refine_mask[1] == 'x') refine_mask(0, 1) = 1;
if (ba_refine_mask[2] == 'x') refine_mask(0, 2) = 1;
if (ba_refine_mask[3] == 'x') refine_mask(1, 1) = 1;
if (ba_refine_mask[4] == 'x') refine_mask(1, 2) = 1;
adjuster->setRefinementMask(refine_mask);
for (int i = 0; i < features.size(); i++)
{
features[i].descriptors = Mat();
}
(*adjuster)(features, pairwise_matches, cameras);
cout << "camera number: " << cameras.size() << endl;
cv::FileStorage fs(xml_name, cv::FileStorage::WRITE);
int num = cameras.size();
fs << "CameraNumber" << num;
//char file_name[256];
for (int i = 0; i<cameras.size(); i++)
{
sprintf(file_name, "Focal_Camera%d", i);
fs << file_name << cameras[i].focal;
sprintf(file_name, "ppx_Camera%d", i);
fs << file_name << cameras[i].ppx;
sprintf(file_name, "ppy_Camera%d", i);
fs << file_name << cameras[i].ppy;
sprintf(file_name, "K_Camera%d", i);
fs << file_name << cameras[i].K();
sprintf(file_name, "R_Camera%d", i);
fs << file_name << cameras[i].R;
}
//fs << "indices" << indices;
fs.release();
return 0;
}