关注
码龄
粉丝数
原力等级 --
被采纳
被点赞
采纳率
清小欢欢欢
2019-06-11 16:41
采纳率: 0%
浏览 1088
首页
人工智能
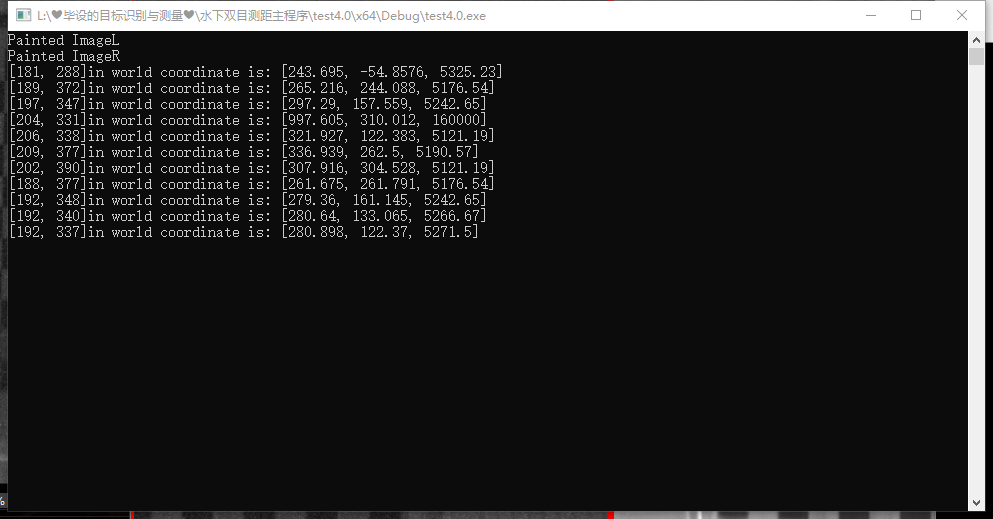
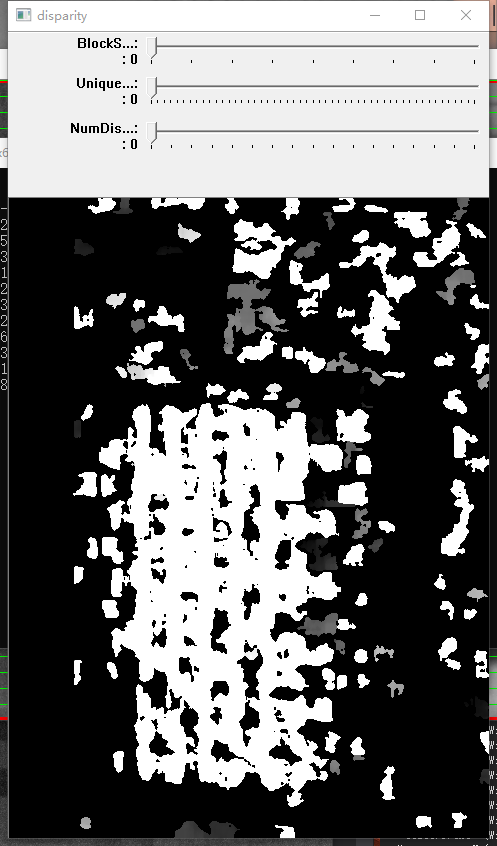
为什么双目测距,深度图测出的距离不正确?
机器学习
c++
深度学习
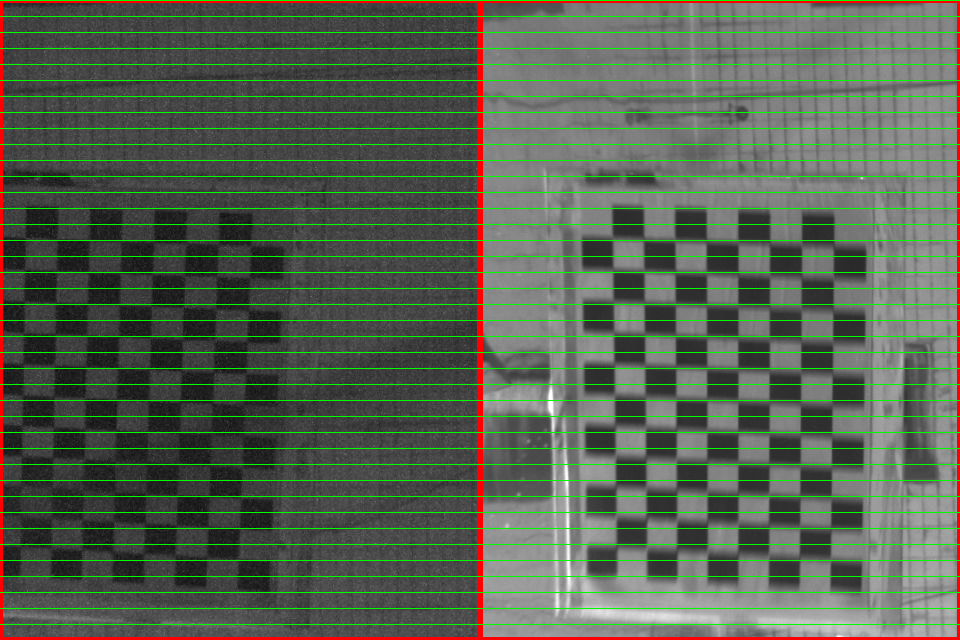
正确的深度距离应该是1.3m左右,这个测出来要5m。但极线匹配的时候效果挺理想的。
收起
写回答
好问题
0
提建议
关注问题
微信扫一扫
点击复制链接
分享
邀请回答
编辑
收藏
删除
结题
收藏
举报
1
条回答
默认
最新
关注
码龄
粉丝数
原力等级 --
被采纳
被点赞
采纳率
这个年纪就是要多吃多睡!
2022-05-23 20:50
关注
我也遇到这个问题了?请问你解决了吗?
本回答被题主选为最佳回答
, 对您是否有帮助呢?
本回答被专家选为最佳回答
, 对您是否有帮助呢?
本回答被题主和专家选为最佳回答
, 对您是否有帮助呢?
解决
无用
评论
打赏
微信扫一扫
点击复制链接
分享
举报
评论
按下Enter换行,Ctrl+Enter发表内容
查看更多回答(0条)
向“C知道”追问
报告相同问题?
提交
关注问题
双目测距
-在Jetson-Nano平台上部署SGBM深度测距+YOLOv5目标检测算法-内附丰富技术资料-优质项目实战.zip
2024-10-18 14:54
在当今的计算机视觉领域,
双目测距
技术因其能够提供三维空间中的
距离
信息而具有重要的研究价值和应用前景。本项目实战教程以Jetson-Nano平台为基础,详细指导如何部署和优化Semi-Global Block Matching (SGBM)算法...
双目测距
--4 双目立体匹配 获取
深度图
2023-05-07 00:10
爱钓鱼的歪猴的博客
在这之前需要已经完成双目标定,这里是利用双目标定结果利用SGBM算法获取
深度图
,以及转伪彩图。OpenCV有三种立体匹配算法:BM算法、SGBM算法、GC算法,这里 我选择了SGBM算法,其速度精度都还不错。
OpenCV C++双目三维重建:双目摄像头实现
双目测距
2022-10-23 09:55
AI吃大瓜的博客
opencv C++实现
双目测距
,opencv三维重建,c++实现三维重建,
双目测距
,WLS滤波,opencv视差图
基于yolov5的目标检测和
双目测距
2023-10-20 21:24
陈子迩的博客
在双目视觉中,两个摄像机的成像位置和角度是预先确定的,它们之间的
距离
被称为基线,通过计算两个相机拍摄的图像中对应像素点的视差,可以计算出每个像素点的深度。双目视觉的主要优势在于其可以通过将两个视角的...
双目三维重建系统(双目标定+立体校正+
双目测距
+点云显示)Python
2021-11-13 11:23
AI吃大瓜的博客
本博客将实现Python版本的双目三维重建系统,项目代码实现包含:`双目标定`,`立体校正(含消除畸变)`,`立体匹配`,`视差计算`和`深度
距离
计算/3D坐标计算` 的知识点。限于篇幅,本博客不会过多赘述算法原理,...
保姆级
双目测距
原理及代码
2025-03-13 06:58
丁先生qaq的博客
双目立体视觉测距,包括畸变矫正、立体校正、视差计算和三维重建。首先,代码从读取相机标定参数,包括内外参、畸变系数等,并使用进行立体校正,确保左右相机的图像对齐。接着,利用计算视差图,并通过WLS(加权...
基于opencv的
双目测距
原理与方法
2024-08-06 00:15
程序员光剑的博客
基于opencv的
双目测距
原理与方法 作者:禅与计算机程序设计艺术 1. 背景介绍 双目视觉是计算机视觉领域的一个重要分支,它模拟人类双眼视觉,通过两个摄像头从不同角度拍摄同一场景,获取场景的深度信息。双目视觉在...
yolov8
双目测距
-yolov8+sgbm(原理+代码)
2024-10-27 19:37
qq1309399183的博客
yolov8
双目测距
-yolov8+sgbm(原理+代码)
基于卷积神经网络cnn的单目测距+深度学习的车距检测系统
2024-11-10 19:15
qq1309399183的博客
基于卷积神经网络cnn的单目测距+深度学习的车距检测系统
YOLOv5实现
双目测距
【已跑通】
2023-03-19 16:42
虚拟指尖的博客
此次修改过后,对环境版本无要求,只要是能跑yolov5的环境就行。
YOLO11单目测距与深度估计和目标检测项目
2025-01-10 10:45
qq1309399183的博客
YOLO11单目测距与深度估计和目标检测项目:方案 1. 引言 2. YOLO11简介 2.1 核心功能 2.2 YOLO11的改进 3. 技术原理与方法 3.1 YOLO目标检测模块 3.2 深度估计模块 3.3 单目测距模块 3.4 多任务损失函数 4...
双目三维测距(python)
2023-04-12 16:08
积极向上的mr.d的博客
本文讲解双目的工作原理,通过双目拍摄棋盘格画面,标定相机,最后实现测距
yolov8
双目测距
使用yolov8+sgbm(原理+代码)
2024-12-29 11:47
QQ_1309399183的博客
计算机视觉实战项目4(图像分类+目标检测+目标跟踪+姿态识别+车道线识别+车牌识别+无人机检测+A_路径规划+单目测距与测速+行人车辆计数等):yolov8
双目测距
使用yolov8+sgbm(原理+代码)
yolo 车辆测距+车辆识别+单目测距+车距检测(单目测距,无需摄像头)
2022-08-08 13:36
斌擎科技的博客
基于yolo目标检测算法实现的车前道路中的车辆和行人检测,并且可以估
测出
目标与本车之间的
距离
。
Android双目三维重建:Android双目摄像头实现
双目测距
2023-03-25 09:30
AI吃大瓜的博客
Android双目三维重建:Android双目摄像头实现
双目测距
Android实现
双目测距
,Android双目三维重建,opencv三维重建,opencv
双目测距
这怕不是全网最小的深度相机?近
距离
测距相机OAK-D-SR来了!
2023-06-28 17:01
OAK中国_官方的博客
OAK-D-SR(Short Range)是专门针对近
距离
测距推出的双目深度相机,与标准款OAK-D-S2相比,其在近
距离
下的测距精度做了提升和优化(特别是在1m内)。OAK-D-SR理论上测距范围0.3~3m,理想测距范围为0.3~1m。0.3m处...
双目测距
原理
2019-05-28 16:16
NineDays66的博客
双目测距
实际操作分4个步骤:相机标定——双目校正——双目匹配——计算深度信息。 相机标定:摄像头由于光学透镜的特性使得成像存在着径向畸变,可由三个参数k1,k2,k3确定;由于装配方面的误差,传感器与光学镜头...
目标检测YOLO实战应用案例100讲-基于双目视觉的目标检测与测距系统
2023-06-20 08:26
林聪木的博客
我国的机器人市场需求世界领先,在医疗、...从2020年新冠疫情出现开始,由于各类公共场都需要减少面对面的人工服务,各种服务机器人的需求量逐渐增加,还产生了很多新型种类的服务机器人,自动接待、智能无人配送等新。
无人驾驶 | 为什么双目自动驾驶系统难以普及?
2021-09-03 10:05
小白学视觉的博客
点击上方“小白学视觉”,选择加"星标"或“置顶”重磅干货,第一时间送达 转载于 :黄浴博士知乎单目视觉是Mobileye(ME)的看家法宝,其实当年它也考虑过双目,最终选...
没有解决我的问题,
去提问
向专家提问
向AI提问
付费问答(悬赏)服务下线公告
◇ 用户帮助中心
◇ 新手如何提问
◇ 奖惩公告

 分享
分享



