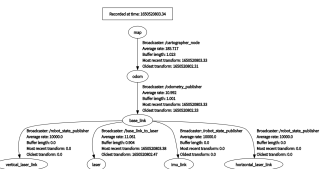
cartographer_ros在加入odom数据后,rviz中odom frame移动,base_link不移动,导致不能建图


cartographer_ros在加入odom数据后,rviz中odom frame移动,base_link不移动,导致不能建图
 分享
分享
RVIZ fix_frame设置和base_link/map/odom关系
https://blog.csdn.net/mingcheng2650/article/details/113120613
ROS 学习系列 -- RViz中移动机器人来学习 URDF,TF,base_link, map,odom和odom 主题的关系
https://blog.csdn.net/viphl/article/details/114999606
分享 系统已结题
4月30日
系统已结题
4月30日 已采纳回答
4月22日
赞助了问题酬金5元
4月21日
创建了问题
4月21日
已采纳回答
4月22日
赞助了问题酬金5元
4月21日
创建了问题
4月21日

