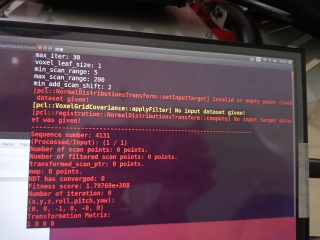
[pct::NormalDistributionsTransform::setInputTarget]无效或空点云
数据集给定!
[PCL::VoxelGridCovariation::applyFilter]没有提供输入数据集!
[pcl::registration::NormalDistributionsTransform::compute]无输入目标数据
ET是给你的!
请问图片所出现如何解决?

[pct::NormalDistributionsTransform::setInputTarget]无效或空点云
数据集给定!
[PCL::VoxelGridCovariation::applyFilter]没有提供输入数据集!
[pcl::registration::NormalDistributionsTransform::compute]无输入目标数据
ET是给你的!
请问图片所出现如何解决?
 分享
分享
你好,我是有问必答小助手,非常抱歉,本次您提出的有问必答问题,技术专家团超时未为您做出解答
本次提问扣除的有问必答次数,已经为您补发到账户,我们后续会持续优化,扩大我们的服务范围,为您带来更好地服务。
分享 系统已结题
11月15日
系统已结题
11月15日 已采纳回答
11月7日
创建了问题
11月4日
已采纳回答
11月7日
创建了问题
11月4日


