
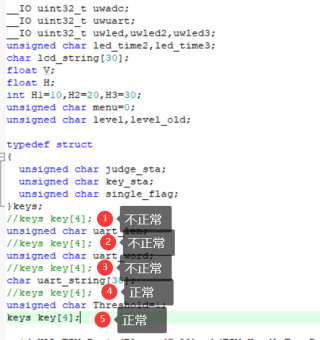
在STM32定义结构体数组的过程中,我发现将结构体数组的位置定义在不一样的位置会有不一样的结果。结构梯定义的是按键的功能,当短按下按键后实现LCD屏幕界面切换。目前的问题是定义的key[0]按键的使用不正常,然而同样操作的key[1]、]key[2]、key[3]
功能正常。下图是问题所在:
下面是有问题的代码定义
__IO uint32_t uwadc;
__IO uint32_t uwuart;
__IO uint32_t uwled,uwled2,uwled3;
unsigned char led_time2,led_time3;
char lcd_string[30];
float V;
float H;
int H1=10,H2=20,H3=30;
unsigned char menu=0;
unsigned char level,level_old;
typedef struct
{
unsigned char judge_sta;
unsigned char key_sta;
unsigned char single_flag;
}keys;
keys key[4];
unsigned char uart_len;
unsigned char uart_word;
char uart_string[30];
unsigned char Threshold=1;
后来我发现将keys key[4];放置在其他位置则key[0]的功能正常。
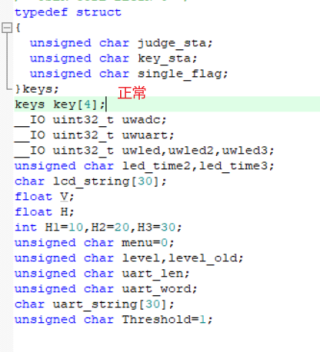
typedef struct
char unsicned judgesta;
har unsigned keysta;
unsigned char single flag
L)keys; 正常
keys key[4];
IO uint32t uwadc
IOuint32t uwuart
IOuint32t uwled,uwled2,uwled3;
unsicned char ledtime2,ledtime3
char lcd string[30】
floatV
float H
intH1=10,H2=20,H3=30;
unsicned char menu=0
unsigned char level,level old;
unsigned char uart len
unsigned char uart word:
charuart string[30];
unsigned char Threshold=l
这是可以正常运行的代码;
__IO uint32_t uwadc;
__IO uint32_t uwuart;
__IO uint32_t uwled,uwled2,uwled3;
unsigned char led_time2,led_time3;
char lcd_string[30];
float V;
float H;
int H1=10,H2=20,H3=30;
unsigned char menu=0;
unsigned char level,level_old;
typedef struct
{
unsigned char judge_sta;
unsigned char key_sta;
unsigned char single_flag;
}keys;
unsigned char uart_len;
unsigned char uart_word;
char uart_string[30];
unsigned char Threshold=1;
keys key[4];
请问我的问题出在哪里呢?是软件问题还是硬件问题呢?
#include "main.h"
#include "stdio.h"
#include "i2c.h"
#include "string.h"
ADC_HandleTypeDef hadc2;
TIM_HandleTypeDef htim4;
UART_HandleTypeDef huart1;
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_ADC2_Init(void);
static void MX_TIM4_Init(void);
static void MX_USART1_UART_Init(void);
//用户代码区
__IO uint32_t uwadc;
__IO uint32_t uwuart;
__IO uint32_t uwled,uwled2,uwled3;
unsigned char led_time2,led_time3;
char lcd_string[30];
float V;
float H;
int H1=10,H2=20,H3=30;
unsigned char menu=0;
unsigned char level,level_old;
typedef struct
{
unsigned char judge_sta;
unsigned char key_sta;
unsigned char single_flag;
}keys;
unsigned char uart_len;
unsigned char uart_word;
char uart_string[30];
unsigned char Threshold=1;
keys key[4];
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance==TIM4)
{
key[0].key_sta=HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_0);
key[1].key_sta=HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_1);
key[2].key_sta=HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_2);
key[3].key_sta=HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0);
for(int i=0;i<4;i++)
{
switch(key[i].judge_sta)
{
case 0:
{
if(key[i].key_sta==0)
{
key[i].judge_sta=1;
}
else
{
key[i].judge_sta=0;
}
}
break;
case 1:
{
if(key[i].key_sta==0)
{
key[i].judge_sta=2;
key[i].single_flag=1;
}
else
{
key[i].judge_sta=0;
}
}
break;
case 2:
{
if(key[i].key_sta==1)
{
key[i].judge_sta=0;
}
}
break;
}
}
}
}
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if(huart==&huart1)
{
uart_string[uart_len]=uart_word;
uart_len++;
HAL_UART_Receive_IT(&huart1,&uart_word,1);
}
}
unsigned char i2c_read(unsigned char address)
{
I2CStart();
I2CSendByte(0XA0);
I2CWaitAck();
I2CSendByte(address);
I2CWaitAck();
I2CStart();
I2CSendByte(0XA1);
I2CWaitAck();
unsigned char val=I2CReceiveByte();
I2CWaitAck();
I2CStop();
return val;
}
void i2c_write(unsigned char address,unsigned char info)
{
I2CStart();
I2CSendByte(0XA0);
I2CWaitAck();
I2CSendByte(address);
I2CWaitAck();
I2CSendByte(info);
I2CWaitAck();
I2CStop();
}
void adc_proc()
{
if(uwTick-uwadc>=1000)
{
uwadc=uwTick;
HAL_ADC_Start(&hadc2);
V=HAL_ADC_GetValue(&hadc2)*3.3/4096;
H=V*100/3.3;
if(H<=H1)level=0;
if(H<=H2&&H>H1)level=1;
if(H>H2&&H<=H3)level=2;
if(H>H3)level=3;
}
}
void lcd_proc()
{
if(menu==0)
{
sprintf(lcd_string," Liquid Level ");
LCD_DisplayStringLine(Line2,(unsigned char*)lcd_string);
sprintf(lcd_string," Height:%.0fcm ",H);
LCD_DisplayStringLine(Line4,(unsigned char*)lcd_string);
sprintf(lcd_string," ADC:%.2fV ",V);
LCD_DisplayStringLine(Line5,(unsigned char*)lcd_string);
sprintf(lcd_string," Level:%d ",level);
LCD_DisplayStringLine(Line6,(unsigned char*)lcd_string);
}
if(menu==1)
{
if(Threshold==1)
{
sprintf(lcd_string," Parameter Setup ");
LCD_DisplayStringLine(Line2,(unsigned char*)lcd_string);
LCD_SetTextColor(Green);
sprintf(lcd_string," Threshold 1:%dcm ",H1);
LCD_DisplayStringLine(Line4,(unsigned char*)lcd_string);
LCD_SetTextColor(White);
sprintf(lcd_string," Threshold 2:%dcm ",H2);
LCD_DisplayStringLine(Line5,(unsigned char*)lcd_string);
sprintf(lcd_string," Threshold 3:%dcm ",H3);
LCD_DisplayStringLine(Line6,(unsigned char*)lcd_string);
}
else if(Threshold==2)
{
sprintf(lcd_string," Parameter Setup ");
LCD_DisplayStringLine(Line2,(unsigned char*)lcd_string);
sprintf(lcd_string," Threshold 1:%dcm ",H1);
LCD_DisplayStringLine(Line4,(unsigned char*)lcd_string);
LCD_SetTextColor(Green);
sprintf(lcd_string," Threshold 2:%dcm ",H2);
LCD_DisplayStringLine(Line5,(unsigned char*)lcd_string);
LCD_SetTextColor(White);
sprintf(lcd_string," Threshold 3:%dcm ",H3);
LCD_DisplayStringLine(Line6,(unsigned char*)lcd_string);
}
else if(Threshold==3)
{
sprintf(lcd_string," Parameter Setup ");
LCD_DisplayStringLine(Line2,(unsigned char*)lcd_string);
sprintf(lcd_string," Threshold 1:%dcm ",H1);
LCD_DisplayStringLine(Line4,(unsigned char*)lcd_string);
sprintf(lcd_string," Threshold 2:%dcm ",H2);
LCD_DisplayStringLine(Line5,(unsigned char*)lcd_string);
LCD_SetTextColor(Green);
sprintf(lcd_string," Threshold 3:%dcm ",H3);
LCD_DisplayStringLine(Line6,(unsigned char*)lcd_string);
LCD_SetTextColor(White);
}
}
}
unsigned char t;
void key_proc()
{
if(key[0].single_flag==1)
{
if(menu==0)
{
menu=1;
}
else
{
menu=0;
Threshold=1;
i2c_write(0,H1);
HAL_Delay(10);
i2c_write(1,H2);
HAL_Delay(10);
i2c_write(2,H3);
HAL_Delay(10);
}
key[0].single_flag=0;
}
if(key[1].single_flag==1&&menu==1)
{
Threshold++;
if(Threshold>3)
{
Threshold=1;
}
key[1].single_flag=0;
}
if(key[2].single_flag==1&&menu==1)
{
if(Threshold==1)
{
H1=H1+5;
if(H1>95)
{
H1=95;
}
}
if(Threshold==2)
{
H2=H2+5;
if(H2>95)
{
H2=95;
}
}
if(Threshold==3)
{
H3=H3+5;
if(H3>95)
{
H3=95;
}
}
key[2].single_flag=0;
}
if(key[3].single_flag==1&&menu==1)
{
if(Threshold==1)
{
H1=H1-5;
if(H1<=0)
{
H1=0;
}
}
if(Threshold==2)
{
H2=H2-5;
if(H2<=0)
{
H2=0;
}
}
if(Threshold==3)
{
H3=H3-5;
if(H3<=0)
{
H3=0;
}
}
key[3].single_flag=0;
}
}
unsigned char judge_uart()
{
if(uart_len==1)
{
if(uart_string[0]=='C')return 1;
else if(uart_string[0]=='S')return 2;
else HAL_UART_Transmit(&huart1,"ERROR\n",6,1000);
}
else
{
return 0;
}
}
void uart_proc()
{
if(uwTick-uwuart<=100)return;
uwuart=uwTick;
if(judge_uart()==1)
{
char text[30];
sprintf(text,"C:H%0.0f+L%d\r\n",H,level);
HAL_UART_Transmit(&huart1,text,strlen(text),1000);
led_time3=1;
}
if(judge_uart()==2)
{
char text[30];
sprintf(text,"S:TL%d+TM%d+TH%d\r\n",H1,H2,H3);
HAL_UART_Transmit(&huart1,text,strlen(text),1000);
led_time3=1;
}
uart_len=0;
}
void uart_output()
{
if(level<level_old)
{
led_time2=1;
level_old=level;
char text[30];
sprintf(text,"A:H%0.0f+L%d+D\r\n",H,level);
HAL_UART_Transmit(&huart1,text,strlen(text),1000);
}
else if(level>level_old)
{
led_time2=1;
level_old=level;
char text[30];
sprintf(text,"A:H%0.0f+L%d+U\r\n",H,level);
HAL_UART_Transmit(&huart1,text,strlen(text),1000);
}
}
void led_proc()
{
if(uwTick-uwled>=1000)
{
HAL_GPIO_TogglePin(GPIOC,GPIO_PIN_8);
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,1);
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,0);
uwled=uwTick;
}
if(uwTick-uwled2>=200&&led_time2>0)
{
uwled2=uwTick;
HAL_GPIO_TogglePin(GPIOC,GPIO_PIN_9);
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,1);
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,0);
led_time2++;
if(led_time2>10)
{
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_9,1);
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,1);
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,0);
led_time2=0;
}
}
if(uwTick-uwled3>=200&&led_time3>0)
{
uwled3=uwTick;
HAL_GPIO_TogglePin(GPIOC,GPIO_PIN_10);
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,1);
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,0);
led_time3++;
if(led_time3>10)
{
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_10,1);
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,1);
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,0);
led_time3=0;
}
}
}
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_ADC2_Init();
MX_TIM4_Init();
MX_USART1_UART_Init();
LCD_Init();
LCD_Clear(Black);
LCD_SetBackColor(Black);
LCD_SetTextColor(White);
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_All,1);
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,1);
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,0);
level=level_old;
// i2c_write(0,30);
// HAL_Delay(10);
//
// i2c_write(1,50);
// HAL_Delay(10);
//
// i2c_write(2,70);
// HAL_Delay(10);
H1=i2c_read(0);
HAL_Delay(10);
H2=i2c_read(1);
HAL_Delay(10);
H3=i2c_read(2);
HAL_Delay(10);
HAL_UART_Receive_IT(&huart1,&uart_word,1);
HAL_TIM_Base_Start_IT(&htim4);
while (1)
{
adc_proc();
lcd_proc();
key_proc();
uart_proc();
uart_output();
led_proc();
}
}








