
MPU6050的使用
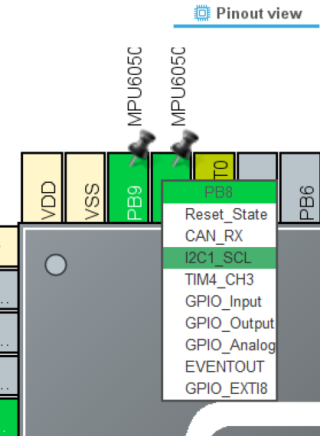
本程序用CubeMX来配置,采用软件模拟I2C的方式来完成MPU6050的数据接受。但在CubeMX的配置图中发现,模拟的GPIO口好像可以直接设置成I2C,于是直接在软件上配置成了I2C来使用,速率设置成了40000,不知道这样是否可行。如图所示:
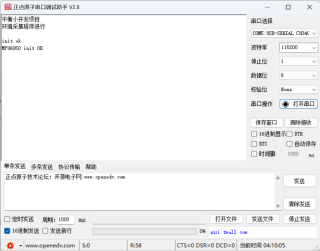
运行最终结果出现了问题,无法进行数据的读取,尚不清楚是哪一方面出现了问题,顺带提一句配置了FREERTOS,恳请给位热心人帮忙,如若可以,可以加我的QQ549978204,记得打个备注,已经写了5天了,实在想不出原因,望各位帮忙。
程序停滞在inv_mpu_user.c文件中的
while(1)
{
if(mpu_dmp_get_data(&pitch,&roll,&yaw)==0)
{
printf("pitch:%f\t,roll:%f\t,yaw:%f\r\n",pitch,roll,yaw);
}
}
串口输出结果为
电路原理图:
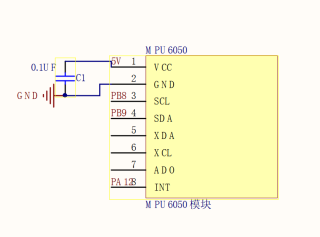
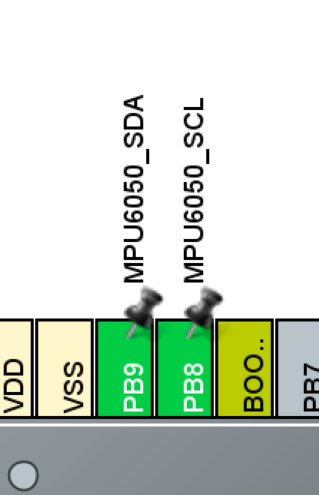
芯片为STTM32C8T6,引脚口为PB8、PB9(具体如图所示)
"inv_mpu_user.h"代码如下:
#ifndef _INV_MPU_USER_H_
#define _INV_MPU_USER_H_
#include <stdio.h>
#include <stdint.h>
#include <stdlib.h>
#include <string.h>
#include <math.h>
#include "inv_mpu.h"
#include "inv_mpu_dmp_motion_driver.h"
#include "mpu6050.h"
#include "usart.h"
unsigned char mpu_dmp_get_data(float *pitch,float *roll,float *yaw);
unsigned char mpu_dmp_init(void);
int DMP_test(void);
#endif
"inv_mpu_user.c"代码如下:
#include "inv_mpu_user.h"
#define PRINT_ACCEL (0x01)
#define PRINT_GYRO (0x02)
#define PRINT_QUAT (0x04)
#define ACCEL_ON (0x01)
#define GYRO_ON (0x02)
#define MOTION (0)
#define NO_MOTION (1)
/* Starting sampling rate. */
#define DEFAULT_MPU_HZ (100)
#define FLASH_SIZE (512)
#define FLASH_MEM_START ((void*)0x1800)
//q30格式,long转float时的除数.
#define q30 1073741824.0f
//struct mpu6050_data OutMpu;
//陀螺仪方向设置
static signed char gyro_orientation[9] = { 1, 0, 0,
0, 1, 0,
0, 0, 1};
//方向转换
unsigned short inv_row_2_scale(const signed char *row)
{
unsigned short b;
if (row[0] > 0)
b = 0;
else if (row[0] < 0)
b = 4;
else if (row[1] > 0)
b = 1;
else if (row[1] < 0)
b = 5;
else if (row[2] > 0)
b = 2;
else if (row[2] < 0)
b = 6;
else
b = 7; // error
return b;
}
//陀螺仪方向控制
unsigned short inv_orientation_matrix_to_scalar(
const signed char *mtx)
{
unsigned short scalar;
/*
XYZ 010_001_000 Identity Matrix
XZY 001_010_000
YXZ 010_000_001
YZX 000_010_001
ZXY 001_000_010
ZYX 000_001_010
*/
scalar = inv_row_2_scale(mtx);
scalar |= inv_row_2_scale(mtx + 3) << 3;
scalar |= inv_row_2_scale(mtx + 6) << 6;
return scalar;
}
unsigned char mpu_dmp_init(void)
{
unsigned char res=0;
struct int_param_s *p = 0;
if(mpu_init()==0) //初始化MPU6050
{
res=mpu_set_sensors(INV_XYZ_GYRO|INV_XYZ_ACCEL);//设置所需要的传感器
if(res)return 1;
res=mpu_configure_fifo(INV_XYZ_GYRO | INV_XYZ_ACCEL);//设置FIFO
if(res)return 2;
res=mpu_set_sample_rate(DEFAULT_MPU_HZ); //设置采样率
if(res)return 3;
res=dmp_load_motion_driver_firmware(); //加载dmp固件
if(res)return 4;
res=dmp_set_orientation(inv_orientation_matrix_to_scalar(gyro_orientation));//设置陀螺仪方向
if(res)return 5;
res=dmp_enable_feature(DMP_FEATURE_6X_LP_QUAT|DMP_FEATURE_TAP| //设置dmp功能
DMP_FEATURE_ANDROID_ORIENT|DMP_FEATURE_SEND_RAW_ACCEL|DMP_FEATURE_SEND_CAL_GYRO|
DMP_FEATURE_GYRO_CAL);
if(res)return 6;
res=dmp_set_fifo_rate(DEFAULT_MPU_HZ); //设置DMP输出速率(最大不超过200Hz)
if(res)return 7;
// res=run_self_test(); //自检
// if(res)return 8;
res=mpu_set_dmp_state(1); //使能DMP
if(res)return 9;
}
printf("init ok\n");
return 0;
}
/***************************************************************************************************************
*函数名:mpu_dmp_get_data()
*功能:得到dmp处理后的数据(注意,本函数需要比较多堆栈,局部变量有点多)
*形参:(struct _out_angle *angle):DMP解算得到的姿态
*返回值:0:成功/1:DMP_FIFO读取失败/2:数据读取失败
***************************************************************************************************************/
//声明这些全局变量,外部好使用
float pitch,roll,yaw;
unsigned char mpu_dmp_get_data(float *pitch,float *roll,float *yaw)
{
float q0=1.0f,q1=0.0f,q2=0.0f,q3=0.0f;
short gyro_dmp[3], accel_dmp[3], sensors_dmp;
unsigned long sensor_timestamp;
unsigned char more;
long quat[4];
dmp_read_fifo(gyro_dmp, accel_dmp, quat, &sensor_timestamp, &sensors_dmp,&more);
if(sensors_dmp&INV_WXYZ_QUAT)
{
q0 = quat[0] / q30; //q30格式转换为浮点数
q1 = quat[1] / q30;
q2 = quat[2] / q30;
q3 = quat[3] / q30;
//计算得到俯仰角/横滚角/航向角
*roll = asin(-2 * q1 * q3 + 2 * q0* q2)* 57.3; // pitch
*pitch = atan2(2 * q2 * q3 + 2 * q0 * q1, -2 * q1 * q1 - 2 * q2* q2 + 1)* 57.3; // roll
*yaw = atan2(2*(q1*q2 + q0*q3),q0*q0+q1*q1-q2*q2-q3*q3) * 57.3; //yaw
}else return 2;
return 0;
}
int DMP_test(void)
{
unsigned char i;
float pitch,roll,yaw;
HAL_Delay(500);
//根据MPU6050官方DMP库说明,初始化时,必须使得Z轴与竖直方向平行,即小车竖立。
i = mpu_dmp_init();
while(i)
{
HAL_Delay(500);
i = mpu_dmp_init();
printf("MPU6050 init error:%d\r\n",i);
}
printf("MPU6050 init OK\r\n");
while(1)
{
if(mpu_dmp_get_data(&pitch,&roll,&yaw)==0)
{
printf("pitch:%f\t,roll:%f\t,yaw:%f\r\n",pitch,roll,yaw);
}
}
}








