envi5.6
遇到很多问题
深度学习每次训练模型都出错,但是我却不知道为什么


envi5.6
遇到很多问题
深度学习每次训练模型都出错,但是我却不知道为什么
 分享
分享
 关注
关注【相关推荐】
1.MNF变换
(1)原理
最小噪声分离变换(Minimum Noise Fraction Rotation,MNF Rotation)工具用于判定图像数据内在的维数(即波段数),分离数据中的噪声,减少随后处理中的计算需求量。MNF本质上是两次层叠的主成分变换。第一次变换(基于估计的噪声协方差矩阵)用于分离和重新调节数据中的噪声,这步操作使变换后的噪声数据只有最小的方差且没有波段间的相关。第二步是对噪声白化数据(Noise-whitened)的标准主成分变换。
MNF变换具有PCA变换的性质,是一种正交变换,变换后得到的向量中的各元素互不相关,第一分量集中了大量的信息,随着维数的增加,影像质量逐渐下降,按照信噪比从大到小排列,而不像PCA变换按照方差由大到小排列,从而克服了噪声对影像质量的影响。正因为变换过程中的噪声具有单位方差,且波段间不相关,所以它比PCA变换更加优越。
(2)作用
作用:分离数据中的噪声,减少之后计算的需求量,即数据降维。
(3)操作步骤
在ENVI主菜单中,选择/Transform/MNF Rotation/Forward MNF Estimate Noise Statistics 。

2.计算PPI像元纯度指数
(1)原理
纯像元指数(Pure Pixel Index, PPI),将投影到大量随机向量端点次数最多的几个像元作为端元。
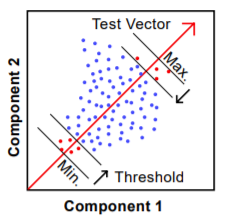
像元纯度指数算法把每个像元作为一个n维向量, 所有像元就组成了一个向量空间V. 在这个向量空间中基并不唯一, 必然存在全部由位于边界位置的向量组成的基, 可以用它们的线性组合来表示所有其他的向量。这些处在边界位置的向量在投影到随机产生的单位向量上时, 出现在随机单位向量边缘的概率最大, 如果有大量的随机单位向量, 这种概率将以频率的形式表现出来。
当图像光谱被视为n维光谱空间中的点时,端元光谱应位于数据云的边缘。光谱点被投影到每个测试向量上,并且在最小和最大投影值的阈值距离内的光谱被标记为极值(如这里的二维图所示)。
(2)操作步骤
在ENVI主菜单中,选择 Spectral-> Pixel Purity Index->[FAST] New Output Band。在打开的Pixel Purity Index Input File对话框中,选择MNF变换结果。(根据情况选择波段,单击Spectral Subset按钮,选择波段)

设置Pixel Purity Index Parameters:


设置阈值,显示感兴趣区:

3.构建n维可视化窗口
(1)定义
n维可视化工具在一个n维空间的数据集中定位、识别和聚类最纯净的像素和最极端的光谱响应(端元)。
(2)操作步骤
在ENVI主菜单中,选择Spectral ->n-Dimensional Visualizer,在n-D Visualizer Input File对话框中选择MNF变换结果,单击OK。

选择1-2-3波段,构建3维散点图。



(1)在Toolbox中,打开/Classification/Endmember Collection工具,在文件对话框中选择影像;
(2)在Endmember Collection面板中,选择Import >from ASCII file。将显示的端元波谱选中,点击OK;
(3)点击Apply按钮,在弹出的对话框选择输出路径,点击OK执行混合像元分解。
分解结果:

总结:
预处理后的影像经过MNF变换,达到数据降维的目的;然后计算PPI像元纯度指数,设置阈值;利用LSMM线性光谱分离模型或fcls_spectral_unmixing扩展工具进行波谱分离,最后得到不同类型的丰度图。
参考链接:
ENVI扩展工具:完全约束最小二乘法混合像元分解:http://blog.sina.com.cn/s/blog_764b1e9d0101dnjz.html
定量/高光谱遥感之——混合像元分解:
https://blog.csdn.net/lijie45655/article/details/49184529
混合像元分解中的端元波谱获取方法:
http://blog.sina.com.cn/s/blog_764b1e9d0100qtv9.html
高级光谱分析:
http://blog.sina.com.cn/s/blog_764b1e9d0102v564.html
GEE进行混合像元分解:
https://zhuanlan.zhihu.com/p/129881408
Linear Spectral Unmixing:
https://www.l3harrisgeospatial.com/docs/linearspectralunmixing.html#:~:text=Linear%20Spectral%20Unmixing%20has%20two%20constraint%20options%3A%20unconstrained,values%20and%20are%20not%20constrained%20to%20sum-to-unity%20%28one%29.
Spectral Tools References:
https://www.l3harrisgeospatial.com/docs/spectraltoolsreferences.html
Collect Endmember Spectra:
https://www.l3harrisgeospatial.com/docs/collectingendmemberspectra.html#Endmembe2
Spectral Unmixing:
https://www.sciencedirect.com/topics/earth-and-planetary-sciences/spectral-unmixing
~~共同学习,共同进步!
分享 创建了问题
11月4日
创建了问题
11月4日


