https://blog.csdn.net/qq_43027065/article/details/122400830 作者您好,首先感谢您给出的TnT评估教程,十分全面仔细,但是鄙人有一个小小的问题想请教您一下:
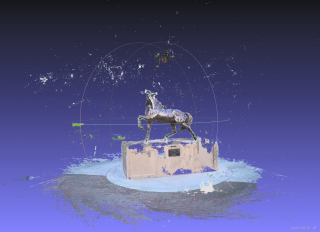
- 我重建出来的马的模型效果,在左上角有很多白点,这在其他场景也是存在的。
- 在您的实验中,这是否正常呢。
- 为了较高的评分,我提交评估前,是否需要对这些杂点进行手工剔除呢?

https://blog.csdn.net/qq_43027065/article/details/122400830 作者您好,首先感谢您给出的TnT评估教程,十分全面仔细,但是鄙人有一个小小的问题想请教您一下:
 分享
分享
 关注
关注引自免费微信小程序:皆我百晓生
在TnT( Tanks and Temples)场景的点云生成问题中,尤其是针对超分辨率重建任务时,出现如您描述的马模型左上角以及其他区域的白点现象是较为常见的。这些“白点”通常代表异常值或噪声点,可能是由于传感器采集误差、算法重建过程中的不稳定性或者后处理步骤不够完善导致。
对于您的三个具体问题:
这种现象并不一定表示有问题,但在追求高质量重建效果时,确实需要关注并尽可能减少这类杂点以提高整体模型的质量和评分。
在不同的实验设置和数据集下,点云中的噪声点多少是可能存在的,这取决于原始LiDAR数据的质量、所使用的重建方法以及后处理策略。在我的经验中,若其他研究者或论文中的实验结果也存在类似情况,则可认为在一定程度上是正常的。
提交评估前,建议对这些杂点进行清理,可以通过以下几种方式:
具体的代码实现会根据您实际采用的编程语言和库有所不同,例如在Python中结合Open3D库进行点云清理的一个简化示例:
import open3d as o3d
# 假设pcd是加载的原始点云
pcd = o3d.io.read_point_cloud("path_to_your_pcd_file.pcd")
# 使用voxel_down_sample进行降采样和初步去噪
pcd_downsampled = pcd.voxel_down_sample(voxel_size=0.02)
# 使用统计 outlier removal
pcd_outlier_removed = pcd_downsampled.remove_statistical_outlier(nb_neighbors=20, std_ratio=2.0)
# 对处理后的点云进行显示
o3d.visualization.draw_geometries([pcd_outlier_removed])
在实际操作中,请根据实际情况调整参数,确保既能有效去除噪声点,又不会误删真实有效的细节点。同时,为了获得更高评分,在优化模型本身的同时,细致的后处理步骤也是至关重要的。
分享 创建了问题
3月12日
创建了问题
3月12日

