调用rosrun ORB_SLAM3 Mono Vocabulary/ORBvoc.txt Examples/Monocular/EuRoC.yaml黑屏报错,并且话题也查不到,摄像头也没启动,如果另开一个终端输入
rosrun usb_cam usb_cam_node
会出现下面情况还是黑屏
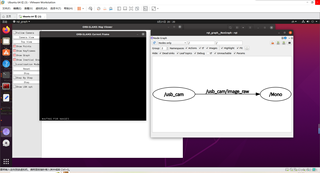

rosrun usb_cam usb_cam_node
会出现下面情况还是黑屏
 分享
分享
 关注
关注让阿豪来帮你解答,本回答参考chatgpt3.5编写提供,如果还有疑问可以评论或留言问题描述: 在运行 ORB_SLAM3 的过程中,出现黑屏报错,话题无法找到,摄像头也没有启动。即使在另一个终端中运行
rosrun usb_cam usb_cam_node,仍然会出现黑屏。
解决方法:
首先,需要检查一下 ORB_SLAM3 运行的配置文件是否正确,检查文件路径和配置参数是否正确。下面以 EuRoC 数据集为例,给出正确的配置文件内容:
Name: ORB_SLAM3-MONO-EUROC
LoadMap: false
MapName: map.bin
LocalMapping: true
LoopClosing: true
Camera.name: MONO8
Camera.width: 752
Camera.height: 480
Camera.fx: 458.654
Camera.fy: 457.296
Camera.cx: 367.215
Camera.cy: 248.375
Camera.bf: 47.9064
Camera.k1: -0.28340811
Camera.k2: 0.07395907
Camera.p1: 0.00019359
Camera.p2: 1.76187114e-05
ORBextractor.nFeatures: 1000
ORBextractor.iniThFAST: 20
ORBextractor.minThFAST: 7
Viewer.KeyFrameSize: 0.05
Viewer.KeyFrameLineWidth: 1
Viewer.GraphLineWidth: 0.9
Viewer.PointSize: 2
Viewer.CameraSize: 0.08
Viewer.CameraLineWidth: 3
Viewer.ViewpointX: 0
Viewer.ViewpointY: -0.7
Viewer.ViewpointZ: -1.8
Viewer.ViewpointF: 500
Stereo.baseline: 0.1
接着,需要检查摄像头是否能够正常工作。运行以下命令:
rostopic list
检查是否能够看到 /camera/image_raw 这个话题。如果看不到,说明摄像头没有正常工作。 然后,可以试着重新启动摄像头,运行以下命令:
sudo service udev reload
roslaunch usb_cam usb_cam-test.launch
如果摄像头还是不能正常工作,可以考虑更换摄像头或者调整配置文件中的参数。 下面是正确的启动 ORB_SLAM3 的命令:
roslaunch ORB_SLAM3_Mono.launch
如果一切正常,就可以看到地图正在建立,ORB_SLAM3 运行正常了。
分享 创建了问题
3月21日
创建了问题
3月21日

