


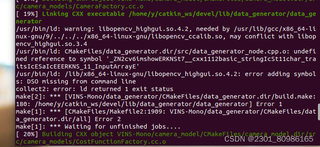
我也不知道怎么解决,有有没帅哥美女帮看看怎么办,感谢大家,第一次跑程序,感觉很有难度,opcv 3.4.15

 分享
分享
 关注
关注让【道友老李】来帮你解答,本回答参考gpt编写,并整理提供,如果还有疑问可以点击头像关注私信或评论。
如果答案让您满意,请采纳、关注,非常感谢!根据提供的图片,这是一个实现相机标定和姿势估计的问题。您可以使用 OpenCV 库来实现这个任务。以下是一个简单的 Python 代码示例,用来进行相机标定和姿势估计:
import cv2
import numpy as np
# 准备棋盘格图像,并读取
images = []
images.append(cv2.imread('image1.jpg'))
images.append(cv2.imread('image2.jpg'))
images.append(cv2.imread('image3.jpg'))
images.append(cv2.imread('image4.jpg'))
# 设置棋盘格的宽度和高度
board_width = 9
board_height = 6
# 准备棋盘格角点的世界坐标
objpoints = []
for i in range(board_height):
for j in range(board_width):
objpoints.append([j, i, 0])
objpoints = [objpoints] * len(images)
# 检测棋盘格角点
image_size = (images[0].shape[1], images[0].shape[0])
ret, cameraMatrix, distCoeffs, rvecs, tvecs = cv2.calibrateCamera(objpoints, images, image_size, None, None)
# 显示标定结果
print("相机内参矩阵:")
print(cameraMatrix)
print("\n畸变系数:")
print(distCoeffs)
# 进行姿势估计
for i in range(len(images)):
image_points, _ = cv2.projectPoints(objpoints[i], rvecs[i], tvecs[i], cameraMatrix, distCoeffs)
print("\n第%d张图像的旋转向量:" % (i+1))
print(rvecs[i])
print("\n第%d张图像的平移向量:" % (i+1))
print(tvecs[i])
请注意,您需要根据实际情况,修改代码中的图像文件名、棋盘格的大小等参数。希望这个代码能帮助到您解决问题,祝您成功!
分享 创建了问题
3月20日
创建了问题
3月20日


