晚上好🌙🌙🌙
本答案参考通义千问
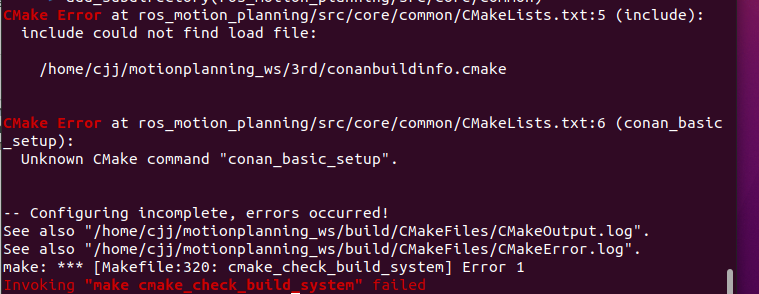
你遇到的错误是由于在使用 ROS Motion Planning 运动规划库时,CMake 无法找到 conan_basic_setup 命令和 conanbuildinfo.cmake 文件。这通常是因为 Conan(一个 C++ 包管理器)没有正确安装或配置。
✅ 问题原因分析
-
Conan 未安装或版本过低
conan_basic_setup 是 Conan 提供的一个 CMake 命令,用于自动加载依赖项。如果 Conan 没有安装或者版本不兼容,就会导致此错误。
-
Conan 配置未正确生成 conanbuildinfo.cmake 文件
在项目中,通常会通过 conanfile.txt 或 conanfile.py 定义依赖项,然后运行 conan install 生成 conanbuildinfo.cmake 文件。如果没有正确执行这个步骤,CMake 就找不到该文件。
-
CMakeLists.txt 中引用了 Conan 相关命令但未正确设置路径
如果 CMakeLists.txt 引用了 Conan 的相关命令(如 include(...) 和 conan_basic_setup()),而 Conan 的路径未被正确设置,也会导致错误。
🔧 解决方案步骤
1. 安装 Conan
确保你已经安装了 Conan,并且版本支持你的 ROS 环境。
pip install conan
注意: 如果你使用的是 Python 3,可能需要使用 pip3,例如:
pip3 install conan
2. 安装依赖包
进入你的工作空间目录,运行以下命令来安装依赖:
cd /home/cjj/motionplanning_ws
conan install ros_motion_planning/src/core/common --build=missing
说明:
--build=missing 表示如果依赖项缺失则进行构建。- 如果你不知道具体路径,可以尝试在项目根目录运行
conan install . --build=missing。
3. 生成 conanbuildinfo.cmake
确保 conan install 成功运行后,会自动生成 conanbuildinfo.cmake 文件。如果你没有看到这个文件,可能是 Conan 安装失败或路径设置有问题。
4. 修改 CMakeLists.txt(可选)
如果你发现 CMakeLists.txt 中引用了 Conan 的内容,但路径不正确,可以修改为如下方式(假设 Conan 生成的文件位于 build/conan 目录):
# 修改前(可能出错)
include(/home/cjj/motionplanning_ws/3rd/conanbuildinfo.cmake)
# 修改后(建议使用相对路径)
include(${PROJECT_SOURCE_DIR}/3rd/conanbuildinfo.cmake)
同时,确保 conan_basic_setup() 被正确调用:
conan_basic_setup()
5. 清理并重新编译
在修改完成后,清理之前的编译结果并重新构建:
cd /home/cjj/motionplanning_ws
rm -rf build/
mkdir build
cd build
cmake ..
make
🛠️ 补充说明
- 如果你使用的是 ROS Noetic 或更高版本,请确保 Conan 兼容这些版本。
- 如果你不想使用 Conan,可以考虑手动安装依赖项,但这会比较麻烦。
- 如果你使用的是 catkin_make 而不是
cmake + make,请确保你正确设置了 CATKIN_ENABLE_TESTING 和其他相关选项。
📝 总结
| 步骤 | 操作 |
|------|------|
| 1 | 安装 Conan(pip install conan) |
| 2 | 执行 conan install 生成依赖 |
| 3 | 确保 conanbuildinfo.cmake 存在 |
| 4 | 修改 CMakeLists.txt 中的路径(如有必要) |
| 5 | 清理并重新编译 |
💡 如果仍然报错?
你可以提供以下信息以进一步排查:
conanfile.txt 或 conanfile.py 内容CMakeLists.txt 中与 Conan 相关的部分- 完整的错误日志(
CMakeError.log)
我可以帮助你进一步分析。