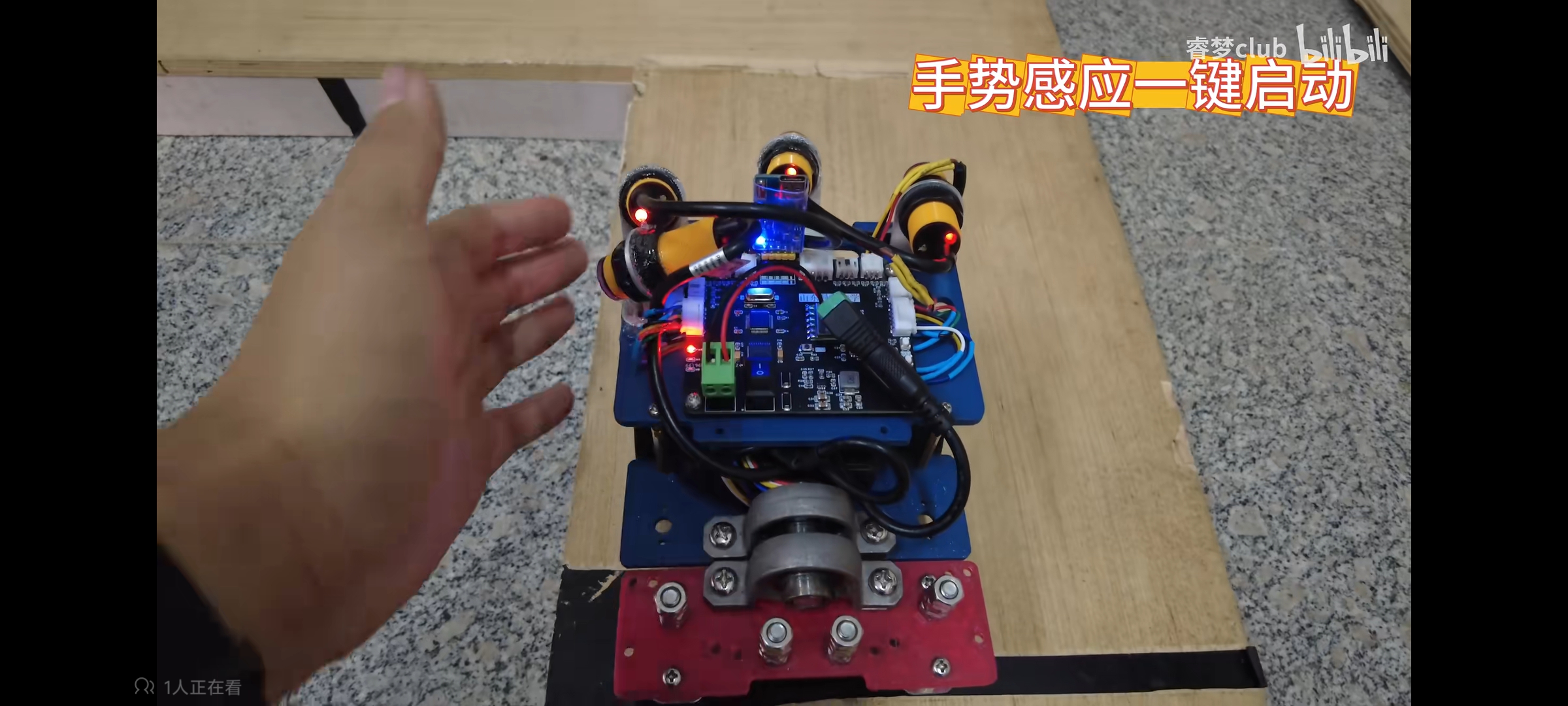
感谢大家,我们都是大一新手,想参加那个山东省高校机器人大赛智能避障小车,请问有知道如图小车的材料的吗
或者有更好的建构的吗。感谢感谢。

 分享
分享
 关注
关注让 “紫雾凌寒” 来帮你回答,本回答结合 DeepSeek
如果还有问题,请评论或点击头像私信,如果有帮助到您, 请关注、采纳、点赞
const int leftSensorPin = 2;
const int rightSensorPin = 3;
const int leftMotorPin1 = 8;
const int leftMotorPin2 = 9;
const int rightMotorPin1 = 10;
const int rightMotorPin2 = 11;
void setup() {
pinMode(leftSensorPin, INPUT);
pinMode(rightSensorPin, INPUT);
pinMode(leftMotorPin1, OUTPUT);
pinMode(leftMotorPin2, OUTPUT);
pinMode(rightMotorPin1, OUTPUT);
pinMode(rightMotorPin2, OUTPUT);
}
void loop() {
int leftSensorValue = digitalRead(leftSensorPin);
int rightSensorValue = digitalRead(rightSensorPin);
if (leftSensorValue == LOW || rightSensorValue == LOW) {
digitalWrite(leftMotorPin1, LOW);
digitalWrite(leftMotorPin2, LOW);
digitalWrite(rightMotorPin1, LOW);
digitalWrite(rightMotorPin2, LOW);
} else {
digitalWrite(leftMotorPin1, HIGH);
digitalWrite(leftMotorPin2, LOW);
digitalWrite(rightMotorPin1, HIGH);
digitalWrite(rightMotorPin2, LOW);
}
}
希望以上解答对您有所帮助。如果您有任何疑问,欢迎在评论区提出。
分享 创建了问题
9月29日
创建了问题
9月29日


