阿里嘎多学长整理AIGC生成,因移动端显示问题导致当前答案未能完全显示,请使用PC端查看更加详细的解答过程
收敛判断问题
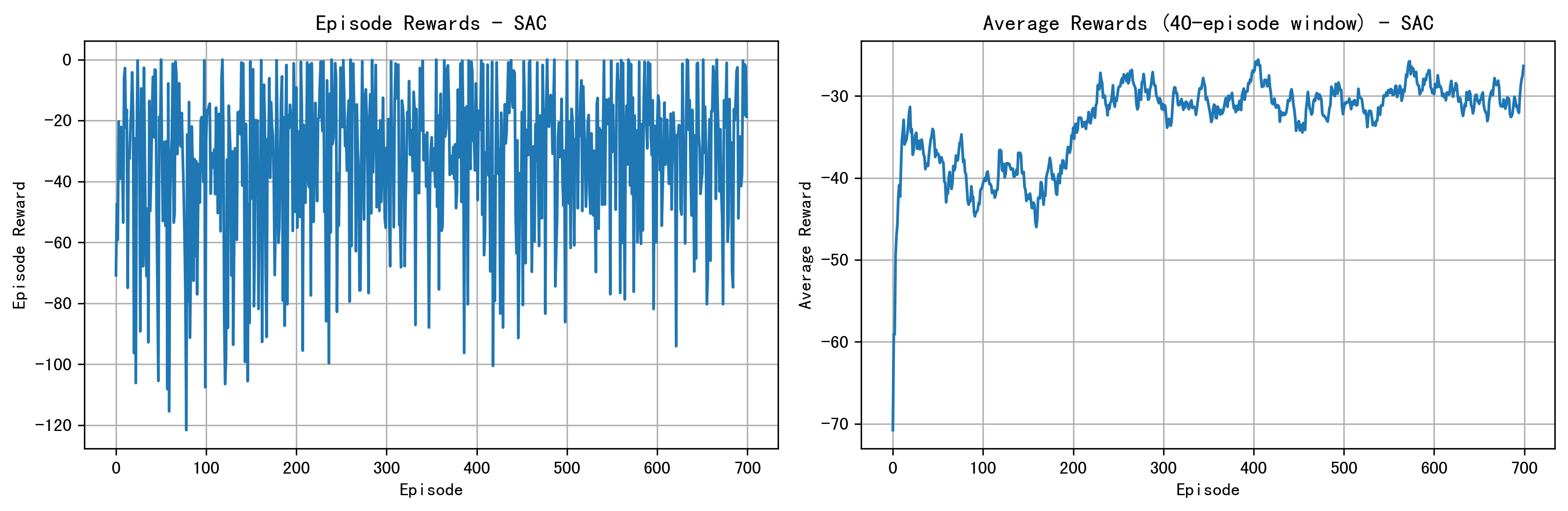
你遇到的问题是,使用SAC算法后,收敛到的数值不在目标控制的范围内。这个问题可能有几个原因:
- 目标函数设计不当:SAC算法使用的是最大化累积回报的目标函数。如果你的目标函数设计不当,可能导致算法优化的结果不符合你的期望。
- 奖励函数设计不当:奖励函数是SAC算法的关键组成部分。如果奖励函数设计不当,可能导致算法优化的结果不符合你的期望。
- 算法参数调整不当:SAC算法有很多参数需要调整,例如学习率、批次大小、actor和critic网络的结构等。如果这些参数调整不当,可能导致算法收敛到不符合期望的结果。
解决方案
- 检查目标函数和奖励函数:检查你的目标函数和奖励函数是否设计得合理。如果需要,进行调整。
- 调整算法参数:调整SAC算法的参数,例如学习率、批次大小、actor和critic网络的结构等。
- 使用不同的收敛指标:使用不同的收敛指标,例如平均绝对误差(MAE)、平均平方误差(MSE)等,来评估算法的收敛情况。
- 使用不同的算法:如果上述方法不起作用,可以尝试使用不同的算法,例如DDPG+PI控制算法。
核心代码
import torch
import torch.nn as nn
import torch.optim as optim
# 定义SAC算法
class SAC(nn.Module):
def __init__(self, state_dim, action_dim):
super(SAC, self).__init__()
self.actor = nn.Sequential(
nn.Linear(state_dim, 64),
nn.ReLU(),
nn.Linear(64, action_dim)
)
self.critic = nn.Sequential(
nn.Linear(state_dim + action_dim, 64),
nn.ReLU(),
nn.Linear(64, 1)
)
def forward(self, state):
action = self.actor(state)
value = self.critic(torch.cat((state, action), dim=1))
return action, value
# 定义目标函数
def compute_reward(state, action, next_state, reward):
return reward + 0.99 * torch.max(self.critic(torch.cat((next_state, action), dim=1)))
# 定义奖励函数
def compute_reward(state, action):
return -torch.norm(action)
# 定义训练过程
def train(model, optimizer, batch_size):
# ...
# ...
# ...
# 训练模型
model = SAC(state_dim, action_dim)
optimizer = optim.Adam(model.parameters(), lr=0.001)
train(model, optimizer, batch_size)
注意
上述代码仅供参考,具体实现可能需要根据你的项目需求进行调整。