这是我要实现的任务
这是出现的问题
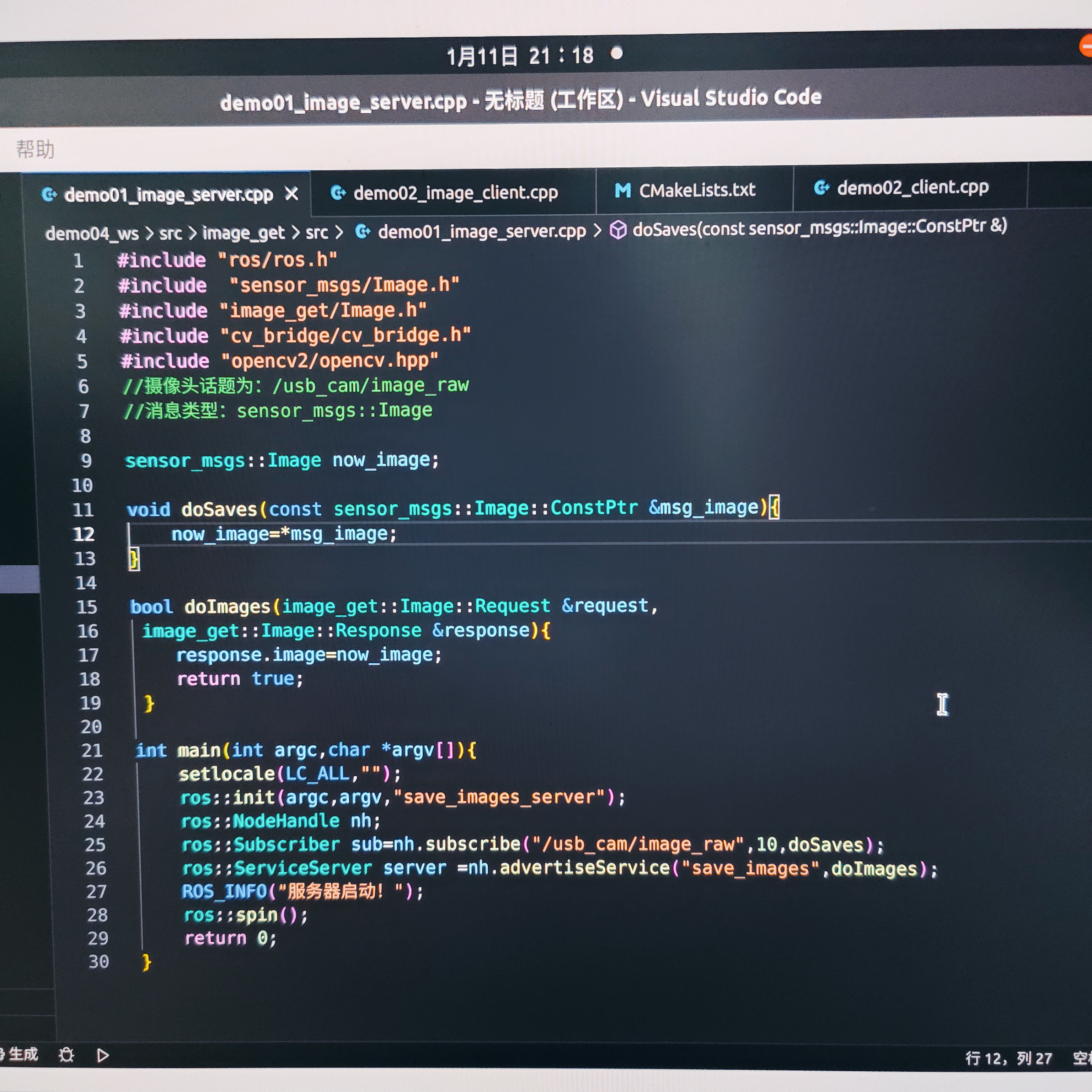
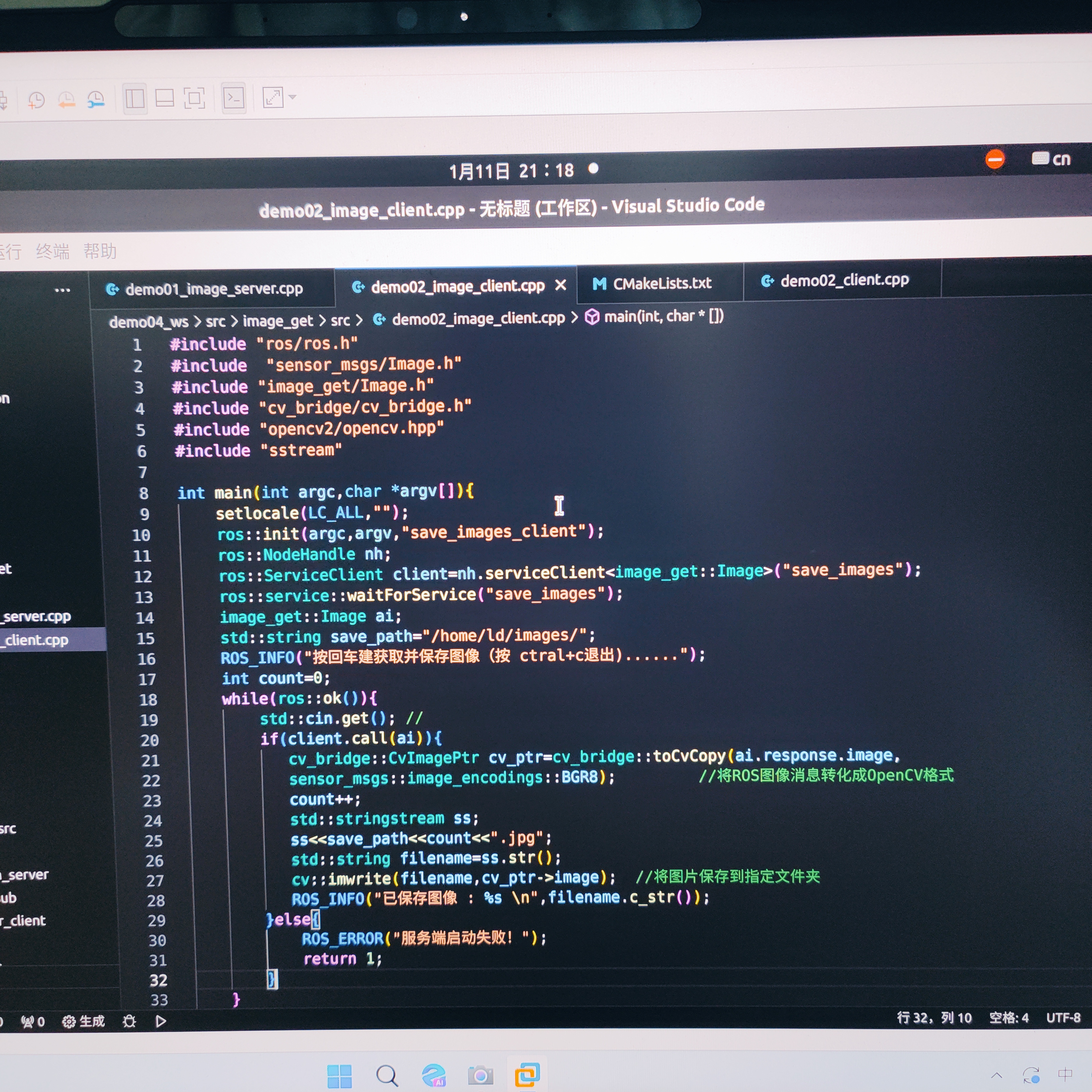
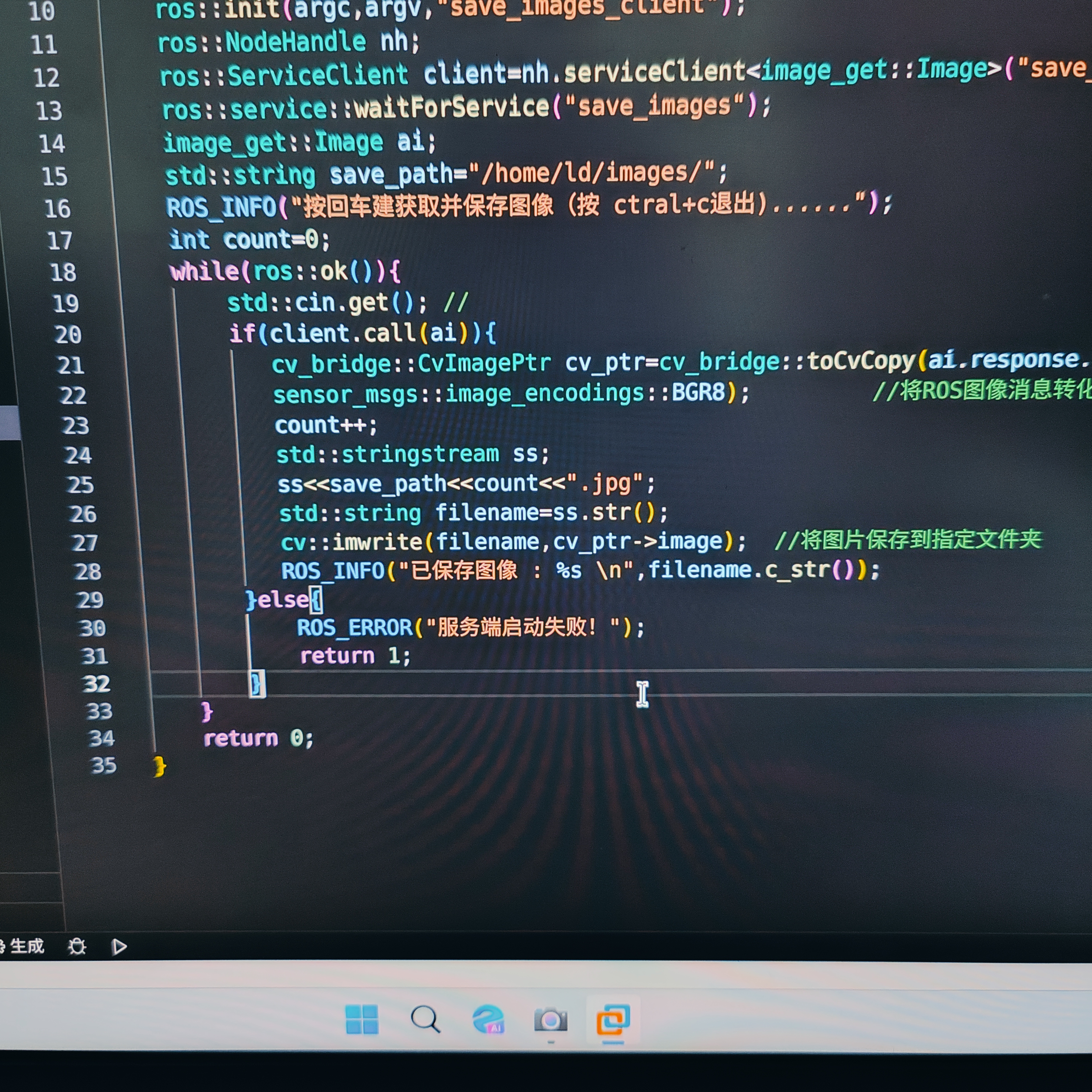
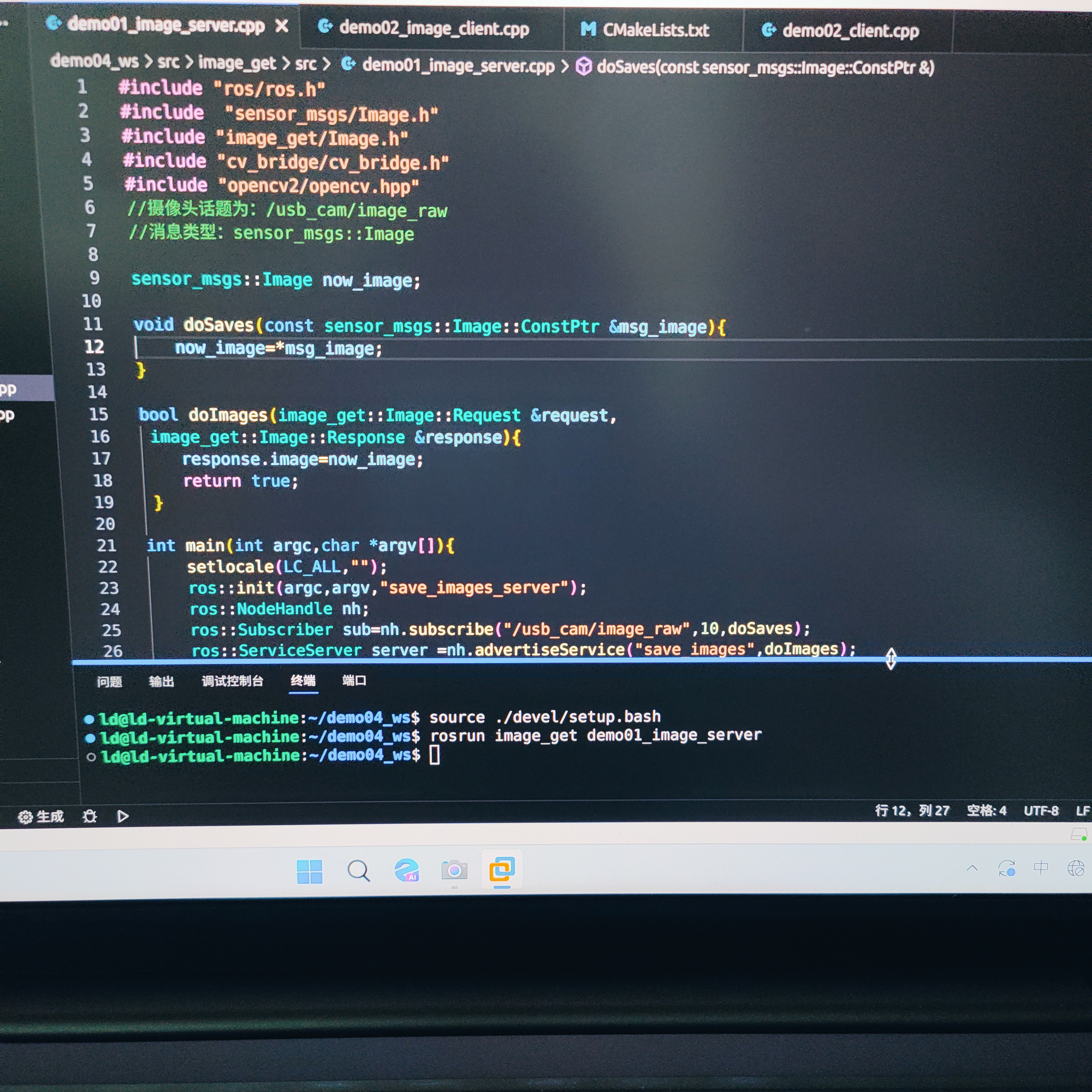
这是客户端和服务端的代码
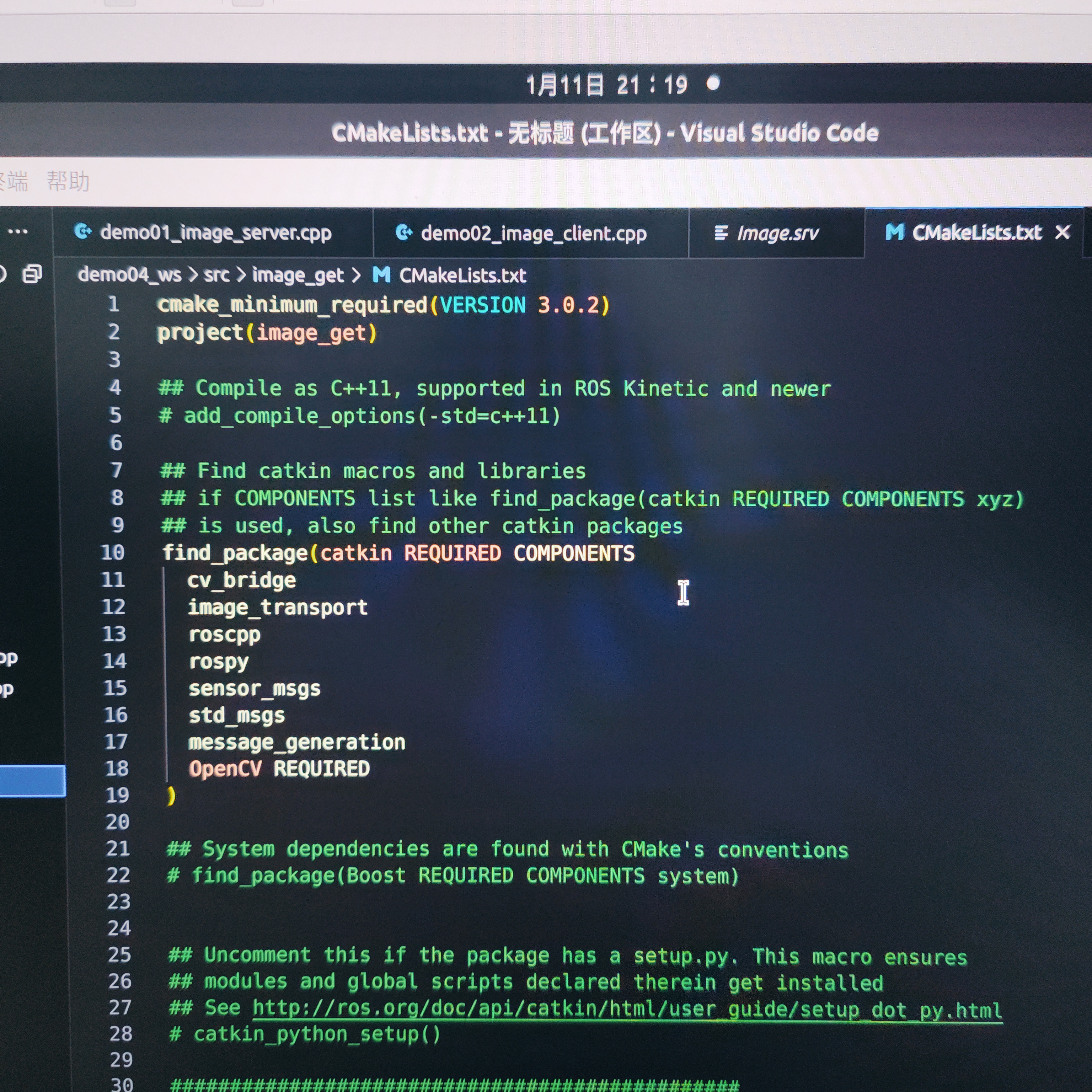
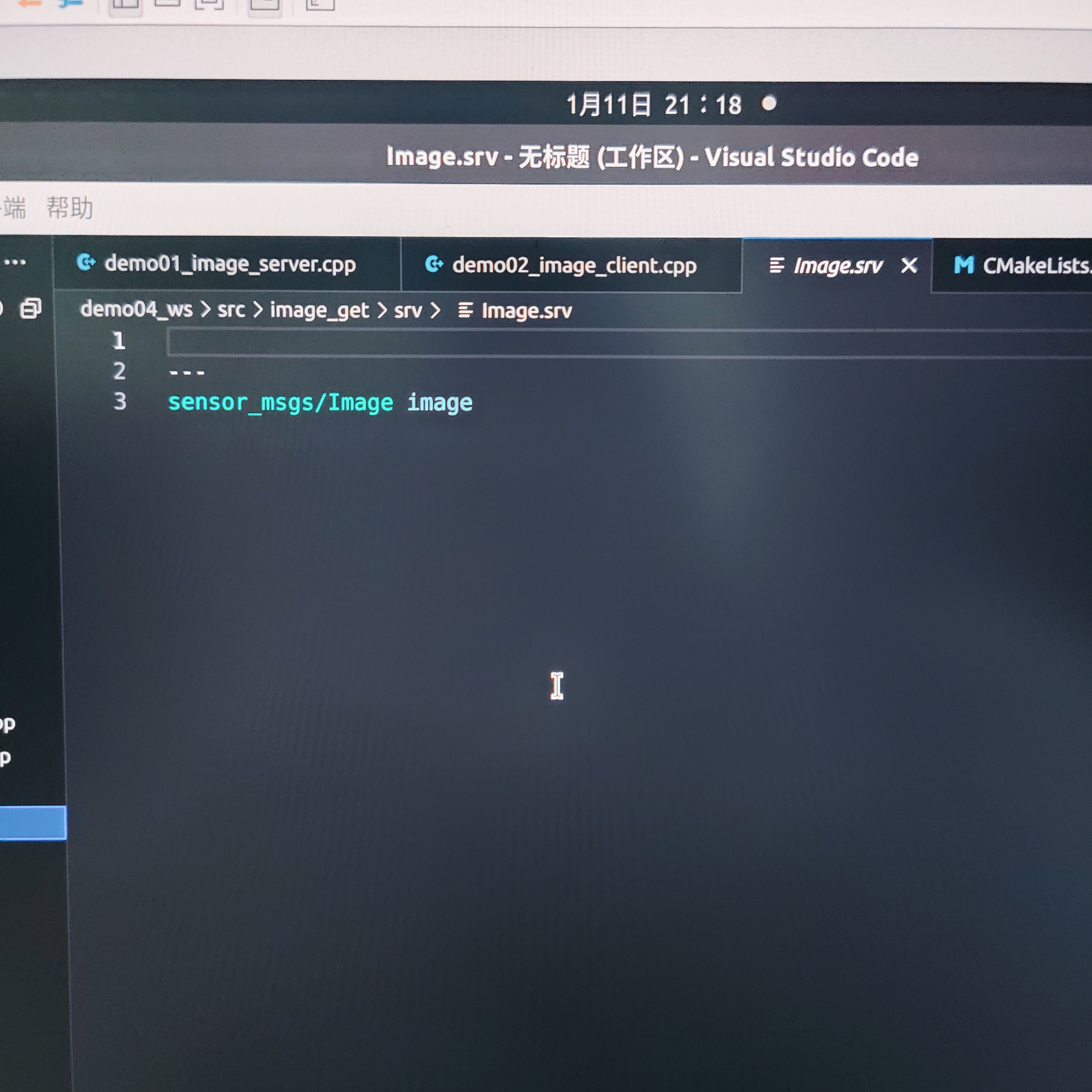
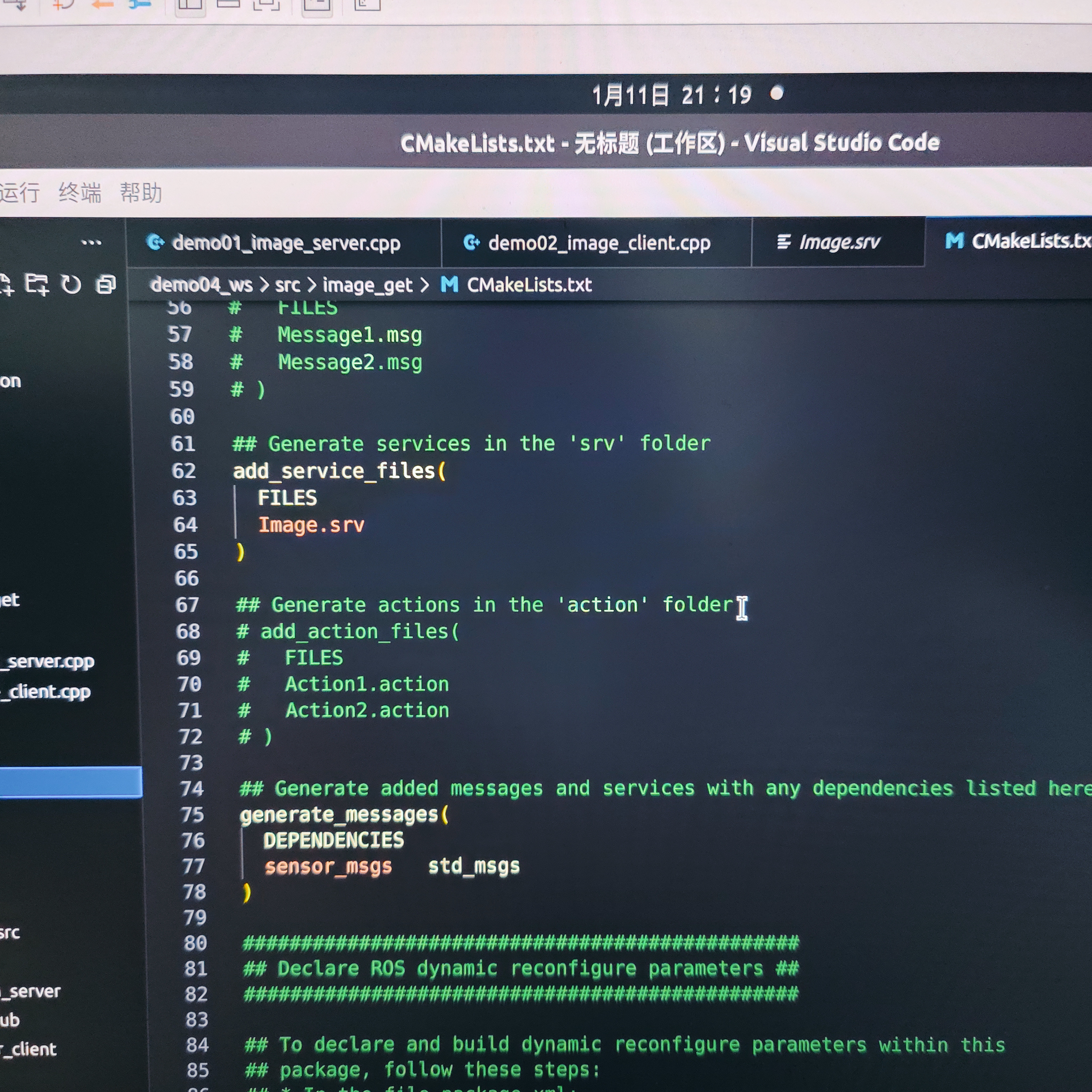
这是相应的文件配置和srv内容

 分享
分享
 关注
关注让 “紫雾凌寒” 来帮你回答,本回答结合 DeepSeek
如果还有问题,请评论或点击头像私信,如果有帮助到您, 请关注、采纳、点赞
解决方案:
- 添加日志记录:
在代码中添加日志记录语句,例如使用ROS自带的日志系统或者其他通用的日志库(如boost::log等)。
示例代码(使用ROS日志):
```cpp
#include “ros/ros.h”
int main(int argc, char **argv)
{
ros::init(argc, argv, “your_node_name”);
ros::NodeHandle nh;
ROS_INFO(“Node started”);
// 后续代码
return 0;
}
- **检查初始化步骤**:
仔细检查节点初始化的各个步骤,比如`ros::init`函数的参数是否正确,`ros::NodeHandle`的创建是否成功等。cpp
int main(int argc, char **argv)
{
if (ros::init(argc, argv, “your_node_name”)!= ros::init::ROS_INIT_SUCCESS)
{
ROS_ERROR(“Failed to initialize ROS”);
return -1;
}
ros::NodeHandle nh;
if (!nh.ok())
{
ROS_ERROR(“Failed to create NodeHandle”);
return -1;
}
// 后续代码
return 0;
}
``
- **调试模式**:
使用调试器(如gdb)来调试程序。在编译时添加调试信息(例如-g`选项),然后在启动节点时用调试器附加到进程上,逐步查看程序执行流程。
3. 不同解决方案的优缺点:
- 添加日志记录:
- 优点:简单易行,能快速定位程序执行到哪一步出现问题,方便查看关键操作的执行情况。
- 缺点:如果问题出在底层库或者系统调用中,日志可能无法提供足够详细的信息。
- 检查初始化步骤:
- 优点:针对性强,能直接排查初始化过程中的关键环节是否正确。
- 缺点:可能遗漏一些非初始化阶段但导致程序异常退出的问题。
- 调试模式:
- 优点:能深入程序内部,查看变量值、函数调用栈等详细信息,有助于全面排查问题。
- 缺点:调试过程相对复杂,需要一定的调试技巧和经验,并且可能会影响程序性能。
4. 总结:
启动节点直接退出且无报错是一个需要仔细排查的问题。通过添加日志记录可以初步了解程序执行流程,检查初始化步骤能针对性地找出可能的问题点,而调试模式则可以更深入地分析程序内部状态。综合运用这些方法,有助于快速定位并解决问题。
由于没有看到具体代码等详细信息,以上解答只是一些通用的排查思路,实际解决问题时需要根据具体情况进行调整。
希望以上解答对您有所帮助。如果您有任何疑问,欢迎在评论区提出。
分享 CFX-solver弹框报错An error has occurred in cfxSsolve:The ANSYS CFX partitioner has terminated wi...如何解决? 报错:create BcosSDK failed, error info: init channel network error: Failed to connect to all t...如何解决?
CFX-solver弹框报错An error has occurred in cfxSsolve:The ANSYS CFX partitioner has terminated wi...如何解决? 报错:create BcosSDK failed, error info: init channel network error: Failed to connect to all t...如何解决? 已结题
(查看结题原因) 3月31日
创建了问题
1月11日
已结题
(查看结题原因) 3月31日
创建了问题
1月11日
