
遇到一个项目:一种改进自适应M-H重采样的粒子滤波算法,希望有人能帮我看看🧐🧐。谢谢了🙏🏻🙏🏻

怎么用matlab编程实现 改进自适应m-h粒子滤波算法

- 写回答
- 好问题 0 提建议
- 追加酬金
- 关注问题
 分享
分享- 邀请回答
-


11条回答 默认 最新
 zuogle 2023-04-05 12:36关注
zuogle 2023-04-05 12:36关注该回答引用ChatGPT GPT-4
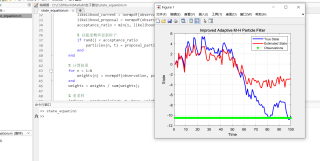
运行结果
代码
% 参数初始化 N = 100; % 粒子数 T = 100; % 时刻数 sigma_sys = 1; % 系统噪声标准差 sigma_obs = 1; % 观测噪声标准差 % 生成真实状态序列 true_state = zeros(T, 1); for t = 2:T true_state(t) = true_state(t-1) + randn() * sigma_sys; end % 生成粒子 particles = randn(N, T) * sigma_sys; % 初始化权重 weights = ones(N, 1) / N; % 用于保存估计状态的变量 state_estimate = zeros(T, 1); % 模拟过程 for t = 1:T % 生成观测值 observation = true_state(t) + randn() * sigma_obs; % M-H算法更新粒子 for n = 1:N % 生成提议粒子 proposal_particle = particles(n, t) + randn() * sigma_sys; % 计算接受概率 likelihood_current = normpdf(observation, particles(n, t), sigma_obs); likelihood_proposal = normpdf(observation, proposal_particle, sigma_obs); acceptance_ratio = min(1, likelihood_proposal / likelihood_current); % 以接受概率更新粒子 if rand() < acceptance_ratio particles(n, t) = proposal_particle; end end % 计算权重 for n = 1:N weights(n) = normpdf(observation, particles(n, t), sigma_obs); end weights = weights / sum(weights); % 重采样 indices = randsample(1:N, N, true, weights); particles(:, t) = particles(indices, t); % 估计状态 state_estimate(t) = mean(particles(:, t)); end % 模拟过程 for t = 1:T % 生成观测值 observation = true_state(t) + randn() * sigma_obs; % 其他代码不变 end % 绘制结果图形 figure; plot(1:T, true_state, 'b', 'LineWidth', 2); % 真实状态用蓝色线表示 hold on; plot(1:T, state_estimate, 'r', 'LineWidth', 2); % 估计状态用红色线表示 scatter(1:T, observation, 'g', 'filled'); % 观测值用绿色点表示 legend('True State', 'Estimated State', 'Observations'); xlabel('Time'); ylabel('State'); title('Improved Adaptive M-H Particle Filter'); grid on;本回答被题主选为最佳回答 , 对您是否有帮助呢?评论 打赏解决 1无用 1举报 分享
- 2023-04-05 10:33回答 11 已采纳 该回答引用ChatGPT GPT-4 运行结果 代码 % 参数初始化 N = 100; % 粒子数 T = 100; % 时刻数 sigma_sys = 1; % 系统噪声标准差 sigma_obs
- 2021-10-07 16:12回答 1 已采纳 你可以边学习遗传算法的代码,一边调试你的matlab程序呢,matlab系统学习当然有好处,但是,你首先的工作是把遗传算法代码熟悉了,而不是花太多时间学习matlab编程;基础的matlab代码知识,
- 2022-05-11 13:54回答 1 已采纳 这个可能和你的粒子群算法的自身性能相关,导致陷入局部最优。建议先检查每一个步骤有错没,如果没有,那么可以调节粒子群算法的权重和学习因子,或者用改进的粒子群算法来进行拟合。
- 2021-04-23 18:09四散的博客 在 此基础上,提出一种基于非局部均值滤波和神经网络的红外焦平面阵列非均匀性校正......512 的图像,大概在一台普通 PC 上要运行 30 秒,如果用 Matlab 编程则可能更慢一点。针对非局部均值算 法时间复杂度庞大的缺点...
- 2021-11-15 18:41回答 1 已采纳 代码供参考 [~,p] = sort(rand(60,1)); for i = 1:1:numel(p) fprintf('第%d名同学,恭喜你抽到第%d道题!\n',i,p(i)) end 示例:
- 2023-03-12 19:42回答 7 已采纳 该回答引用ChatGPT 如有疑问,可以回复我! 运行结果 代码如下: % 定义信源符号及其对应的概率 source = ['A', 'B', 'C', 'D', 'E']; prob = [0
- 2021-07-27 15:38回答 1 已采纳 你前面只有一个圆环,后面又出现10个圆环,表述十分混乱
- 2023-03-30 00:15林聪木的博客 基于对自然界各种动物群体行为进行研究,人们受其启发设计了各种仿生智能算法。这些算法原理简单,实现方便,在...基于对青蛙觅食过程的研究,Eusuff[34]于2003年提出混合蛙跳算法算法结合了模因算法和粒子群优化算法。
- 2021-10-31 16:05回答 2 已采纳 仔细给你对比了一下,图片中圈着的下标改一下 就可以啦,有帮助望采纳哟哈哈
- 2022-05-08 11:53回答 1 已采纳 t_max=100; w=0.01; %初始权重 for t=1:t_max w(t+1)=(w(t)-0.001)*exp(1/(1+(t/t_max))); end %% 作图 plo
- 2021-06-25 17:15回答 1 已采纳 dfun = @(x,y) cos(x)*sqrt(y); h = 0.05; h = 0.05; X = 1.2:h:2.05; %% RK2 x = 1.2; % 初始值 y = 3.2;
- 2022-02-09 17:18拓端研究室TRL的博客 原文链接:http://tecdat.cn/?p=25376Metropolis-Hastings 算法...MCMC实现这一目标的方式是在该分布上 "徘徊",使在每个地点花费的时间与分布的概率成正比。如果 "徘徊 "过程设置正确,你可以确保这种比例关系(花...
- 2023-03-16 16:00回答 2 已采纳 参考GPT和自己的思路: 使用非线性混合效应模型来预测锂电池剩余寿命是可行的。建议使用MATLAB中的工具箱,例如Statistics and Machine Learning Toolbox来构建和
- 2022-08-05 15:28海神之光的博客 粒子群算法优化BP神经网络PID控制 完整的代码,方可运行;可提供运行操作视频!适合小白!
- 2023-04-17 00:30林聪木的博客 的训练数据集提取该数据集中的数据特征,利用反向传播技术不断用学到的特征修改网。络的参数从而达到网络学习的目的,最终建立输入与目标之间的映射关系。习,通过大量数据样本完成对神经网络参数的调整,以达到拟合...
- 没有解决我的问题, 去提问


问题事件
 系统已结题
4月20日
系统已结题
4月20日 已采纳回答
4月12日
已采纳回答
4月12日-
赞助了问题酬金20元
4月5日
-
创建了问题
4月5日
悬赏问题
- ¥20 机器学习能否像多层线性模型一样处理嵌套数据
- ¥20 西门子S7-Graph,S7-300,梯形图
- ¥50 用易语言http 访问不了网页
- ¥50 safari浏览器fetch提交数据后数据丢失问题
- ¥15 matlab不知道怎么改,求解答!!
- ¥15 永磁直线电机的电流环pi调不出来
- ¥15 用stata实现聚类的代码
- ¥15 请问paddlehub能支持移动端开发吗?在Android studio上该如何部署?
- ¥20 docker里部署springboot项目,访问不到扬声器
- ¥15 netty整合springboot之后自动重连失效