



4条回答 默认 最新
 楚俊慕 2018-10-12 02:05关注
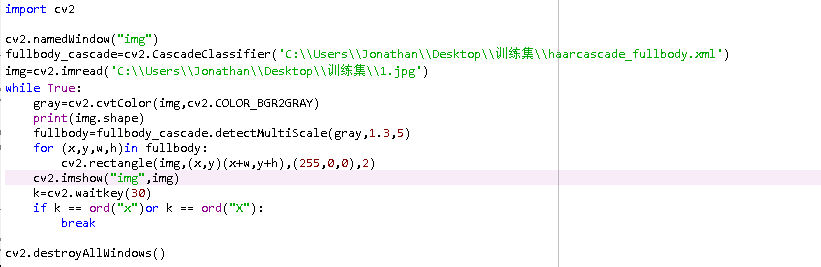
楚俊慕 2018-10-12 02:05关注cvtcolor函数给的参数是cv.COLOR_BGR2GRAY,你的目的是把RGB彩色图像转化为灰度图像。
问题出在你的img变量上,即源图像‘1.jpg’本身就不是RGB图像(可能它只是个灰度图像),导致颜色转换时出错了。本回答被题主选为最佳回答 , 对您是否有帮助呢?解决 无用评论 打赏举报 分享
分享
- 2022-09-26 15:57Kamen Black君的博客 众嗦粥之所周知,在如今机器视觉(Computer Versionshort for CV)是人工智能与机器人技术发展的一个重大研究方向,而opencv作为一个专门为机器视觉编程提供技术与函数支持的第三方库,自然是一个需要重点研究的内容...
- 2021-05-29 21:55黑脉金的博客 灰度模式即使用单一色调来表示图像,与位图模式不同,不像位图只有0和1,使用256级的灰度来表示图像,一个像素相当于占用8为一个字节,每个像素值使用0到255的亮度值代表,其中0为黑色,255为白色,相当于从黑->...
- 2023-09-20 12:30EneDev的博客 最后,使用cv2.cvtColor函数将彩色图像转换为灰度图像,并使用cv2.imshow函数显示原始图像和转换后的灰度图像。图像读取错误:如果图像无法被正确读取,可能会导致空图像的输入。检查图像读取:使用cv2.imread函数...
- 2022-02-03 22:531. 基于python的opencv4.6.5内部函数库 2. opencv中所有函数的个人实际使用以及相关功能描述 3. 注释相对简单,具体描述需自己学习 4. 不了解的函数或者不懂的注释可以csdn中查找更详细的用法
- 2020-12-06 08:47啦啦啦柠檬的博客 For one of my course projects, I need to use the OpenCVs GPU ... I am working on an existing code where OpenCV python is used and my work is to find a way to access the OpenCV Cuda libraries as...
- 2020-11-20 23:20weixin_39763293的博客 Python配置opencv原理Python调用opencv的原理是:opencv编译出共享库文件,python把这个共享库文件作为一个模块加载并使用。通俗点就是,编译opencv的时候开启python接口选项,编译好了会产生cv2.so(linux下)或者cv...
- 2023-12-01 15:08木彳的博客 在Python中,OpenCV(Open Source Computer Vision Library)是一个广泛使用的图像和视频处理库。它包含许多用于图像处理和计算机视觉任务的...本文对一些常用的OpenCV函数及其详细解释和示例,以帮助大家理解和使用。
- 2020-09-20 11:14它具有强大的标准库支持,使Python在数据科学、机器学习、人工智能、网络开发和自动化等多个领域得到广泛应用。 OpenCV是一个开源的计算机视觉和机器学习软件库。它具有众多的计算机视觉功能,包括人脸检测、物体...
- 2024-04-01 17:19_小灰鸽_的博客 为自己也为别人,整合opencv的函数,欢迎纠错!
- 2025-03-17 16:42风逸尘_lz的博客 简而言之就是cv2.findContours是一个寻找轮廓的函数,输入图像为二值图像,然后当参数设为轮廓检索模式的时候,意味着检索所有的轮廓,但是不建立层级关系,调用该函数之后,返回图像中检测物体的轮廓和层级信息,...
- 没有解决我的问题, 去提问

