关注
码龄
粉丝数
原力等级 --
被采纳
被点赞
采纳率
AFFDJ
2019-04-13 21:19
采纳率: 50%
浏览 832
首页
开发工具
已采纳
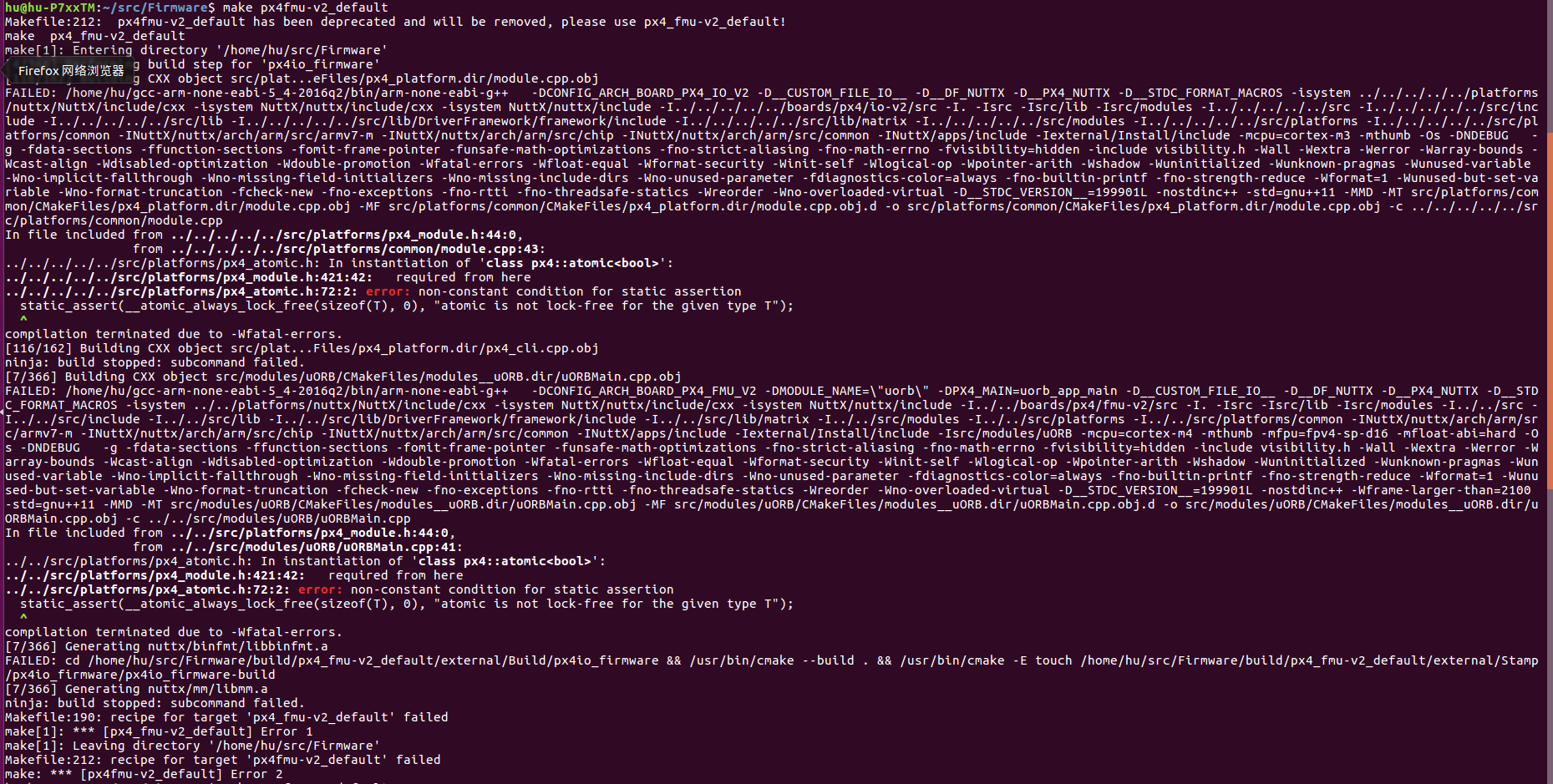
ubuntu16.04下PX4编译一直出错
git
ubuntu
linux
PX4编译一直有问题,用脚本也试了,不用脚本一步步安装也尝试了,总会出现如下图的问题
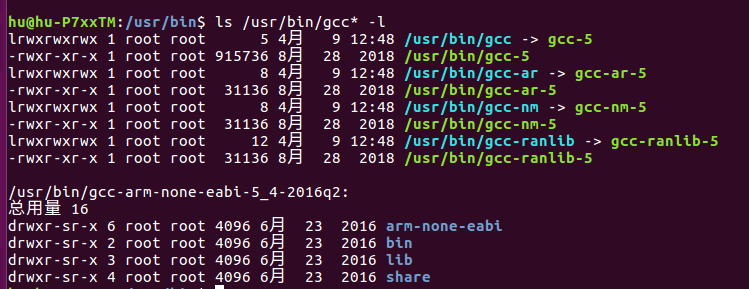
GCC装得也是5.4
求大神指导
收起
写回答
好问题
0
提建议
关注问题
微信扫一扫
点击复制链接
分享
邀请回答
编辑
收藏
删除
结题
收藏
举报
1
条回答
默认
最新
关注
码龄
粉丝数
原力等级 --
被采纳
被点赞
采纳率
AFFDJ
2019-04-14 10:44
关注
更新最新版本的GCC和G++,但后续可能出现新的问题
本回答被题主选为最佳回答
, 对您是否有帮助呢?
本回答被专家选为最佳回答
, 对您是否有帮助呢?
本回答被题主和专家选为最佳回答
, 对您是否有帮助呢?
解决
无用
评论
打赏
微信扫一扫
点击复制链接
分享
举报
评论
按下Enter换行,Ctrl+Enter发表内容
查看更多回答(0条)
向“C知道”追问
报告相同问题?
提交
关注问题
ubuntu
16.04
搭建APM
编译
环境源码
2022-03-12 11:06
在
Ubuntu
16.04
上搭建APM(Autonomous Pilot Module)
编译
环境是一项重要的工作,特别是对于无人机和机器人控制系统开发的工程师来说。APM是开源的飞行控制软件,支持多旋翼、固定翼以及地面车辆等多种平台。本文将...
PIXhawk-
PX4
-
Ubuntu
16.04
镜像.txt
2020-05-24 13:02
资源内含VMware Workstation 12虚拟机
Ubuntu
16.04
安装好PIX/APM
编译
所需软件的镜像 内含
PX4
源码
PX4
开发
编译
环境 APM
编译
环境 Pixhawk开发
编译
环境
Ubuntu
资料
Ubuntu
16.04
下
PX4
开发环境配置
2017-07-09 20:42
明年暑假升初中的博客
问题3 QT配置问题
PX4
Ubuntu
16.04
开发环境配置看到官网有详细介绍(官网安装说明链接)时,喜出望外,列下了一串学习任务,以为会很快就搞定开发环境,结果搞了半天发现自己还是too young too naive,一步一个坑,...
Ubuntu
16.04
配置
PX4
编译
环境
2020-05-10 14:31
BUG一个接一个的博客
紧跟
PX4
官方教程即可,我采用的是
Ubuntu
16.04
http://dev.
px4
.io/master/en/setup/dev_env_linux_
ubuntu
.html 所以步骤如下: Download
PX4
Source Code: git clone ...
从零开始的
Ubuntu
16.04
下
PX4
编译
环境的搭建
2018-06-01 15:37
Mordiary的博客
近来入手了一块pixhawk,想进行一些基于已有代码的二次加工,于是到官网https://dev.
px4
.io/上看教程。官网上的教程是分为中文、英文以及韩文的版本。很多人肯定第一反应就是看中文的版本。但是这样做弊端真的很大,...
ubuntu
16.04
px4
编译
2018-06-10 23:30
Roger_LZX的博客
编译
: cd Firmware make
px4
fmu-v2_default 问题记录:
编译
时提示说: python import error: No module named 'em' Required python packages not installed. On a Debian/
Ubuntu
system please run: sudo apt-get...
基于
ubuntu
16.04
塔建
PX4
编译
环境
2020-04-28 13:43
进击的蜗牛_QJ的博客
基于
ubuntu
16.04
塔建
PX4
编译
环境基于
ubuntu
16.04
塔建
PX4
编译
环境环境塔建官网网址:权限设定删除modemmanager更新软件包列表,并为所有
PX4
构建目标安装以下依赖项。安装pyulog。Ninja构建基于NuttX的硬件查看arm-...
Ubuntu
16.04
安装
PX4
原生固件
2019-07-13 17:46
dckwin的博客
Ubuntu
16.04
安装
PX4
原生固件添加权限公共依赖安装安装FastRTPS仿真依赖安装硬件
编译
依赖安装代码下载代码
编译
总结 本教程查考2019年7月的官网教程,推荐按照官网的英文版最新教程来安装。
Ubuntu
下
PX4
官网按照方法...
ubuntu
16.04
下
px4
环境搭建与固件
编译
2018-05-20 22:07
weixin_41922934的博客
px4
官网提供了一个批处理方式搭建
px4
开发环境,十分好用,按照官网步骤1 sudo usermod -a -G dialout $USER2 登出再登入使命令生效3下载几个脚本,不需要每个都下,几个脚本是包含关系下面会细说:
ubuntu
_sim_common...
Ubuntu
16.04
下
PX4
环境快速搭建及uORB通信机制
2021-08-01 21:50
诗筱涵的博客
Ubuntu
16.04
下
PX4
环境快速搭建及uORB通信机制 勤奋比天赋更重要 2017-09-02 22:22:01 6257 收藏 10 分类专栏:
PX4
研究笔记 版权
Ubuntu
16.04
下的环境搭建 之前搭建
PX4
环境常常
编译
不通,cmake,gcc,以及交叉...
Ubuntu
16.04
下手动配置pixhawk飞控--
PX4
固件版本开发环境(ROS+mavros版本)
2019-06-27 15:24
圣右的博客
参考
px4
官网流程: https://dev.
px4
.io/en/setup/dev_env_linux_
ubuntu
.html https://dev.
px4
.io/en/setup/building_
px4
.html 配置过程中网速一定要好!!!!一定要好!!!!最好翻墙!!!不然会出很多...
一、
PX4
环境搭建和
编译
(
Ubuntu
16.04
、ROS kinetic)
2020-05-24 10:46
手可摘星辰不去高声语的博客
Ubuntu
16.04
源于:官网
PX4
开发指南(v1.10.0)<master> https://dev.
px4
.io/v1.10/zh/ 一.开发环境的搭建 Ubutun
16.04
是标准/推荐的Linux开发操作系统。 你可以在这上面
编译
所有的
PX4
对象(基于Nuttux平台...
PX4
固件源码
编译
中的坑
2021-01-08 03:46
我这里是使用的我自己的电脑,安装的是
ubuntu
16.04
系统,装有ROS Kinetic,包括gazebo之类的软件已经有了,这些安装方法网上也有很多,这里不多说。 1、创建仿真环境,第一步是源码
编译
PX4
固件: 我的飞控是pixhawk4...
px4
在
ubuntu
16.04
下搭建
编译
环境遇到的问题及解决方法
2018-09-06 19:26
px4 的鱼的博客
这几天搭建
px4
在
ubuntu
16下的
编译
环境,遇到下载完git源码后输入make
px4
fmu-v2_default命令不成功的问题,在师兄帮助下改为make
px4
fmu-v4_default,发现可以成功creating,但上传时遇到warning,后改为make
px4
fmu...
Ubantu
16.04
下交叉
编译
工具链安装
2021-06-02 19:08
橙子太的博客
本人使用的是64位ubantu和64位GCC
编译
工具,默认ubantu已经有了root。点击查看如何root 1.首先将所需的GCC压缩包拖拽至Documents中,拖拽不成功者可能需要重装 VM tools 2.在
Ubuntu
中创建目录:/usr/local/arm,...
ubuntu
16.04
下,ROS+
PX4
+QGC安装
2020-09-24 10:31
zyf615的博客
ubuntu
16.04
下,ROS+
PX4
+QGC安装 第一步:ROS安装
ubuntu
下
PX4
编译
环境的配置与源码
编译
2019-11-07 13:17
qq_44752278的博客
标题
ubuntu
下
PX4
编译
环境的配置与源码
编译
讲的的是
PX4
编译
环境的安装和对程序正确的
编译
i,不涉及到后面GOZAO仿真和QT 的安装和使用。 总共准备搭建这个环境到搭建基本的环境永乐两周的时间。 期间,了解了很多...
没有解决我的问题,
去提问
向专家提问
向AI提问
付费问答(悬赏)服务下线公告
◇ 用户帮助中心
◇ 新手如何提问
◇ 奖惩公告


 分享
分享


