
num=[9.8 -0.69972 0.01666];
den=[120 9.568 0.2754 0.0001];
[A,B,C,D]=tf2ss(num,den); %算出A,B,C,D
Q=1;
R=1;yr=60; %yr=60为理想输出
E=B*inv(R)*B';
F=C'*inv(Q)*C;
P=are(A,E,F);
g=inv(P*E-A')*C'*Q*yr;
L=inv(R)*B'*g
K=-inv(R)*B'*P
M=A-E*P;
y=poly(M);
r=roots(y)
S=E*inv(P*E-A')*C'*Q*yr;
t=0:0.1:300;
y1=step(A+B*K,S,C,D,1,t);grid on;%最优控制律为u(t)=Mx(t)+Su(t)
plot(t,y1,'r');%红色为输出跟踪器的阶跃响应
gtext('输出跟踪');
xlabel('Time/s');ylabel('y')
hold on;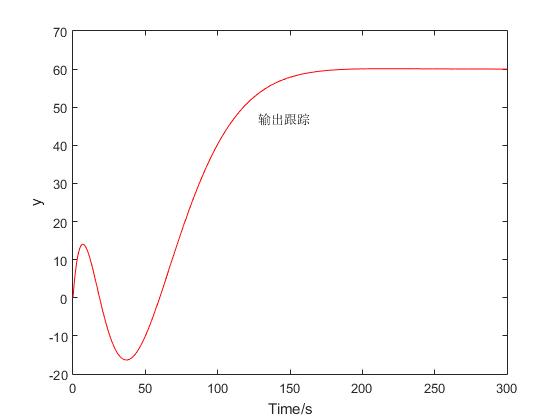
求大神请教为什么,怎么解决?







