

目前有一个深度相机TOF(PMD)和一个彩色相机,深度相机放小车左边,提取小车距左边树干的距离,彩色相机和小车方向是一致的。
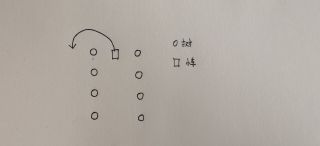
小车通过两排树之后,绕着左边最后一棵树进行左转掉头,不考虑小车最小转弯半径,假设掉头轨迹为半径为R的半圆。
如何在彩色视频中规划出一条掉头的导航线来?(即进入掉头区域后,如何根据深度相机收集到的信息在彩色相机中可视化一条拐弯的线,辅助驾驶员进行打轮?)
这是彩色相机收集到的图像,视频中标记的树为小车需要掉头的地方。

这是TOF相机收集到的图像

彩色相机视角中是没有任何参照物,特征的,如何规划出这样的一条可视化路线呢?

请各位帮帮忙,提供一点一滴解决方案,或者说一声理论上这个可不可行?







