我正在寻找一种代码来检测动态场景中的移动物体。 大多数方法都使用背景减法,但对于动态背景,此方法不起作用。 你有什么建议? 我不想使用 AI 模型,因为它是一个嵌入式应用程序。
谢谢。

在动态场景中移动物体

- 写回答
- 好问题 0 提建议
- 关注问题
 分享
分享- 邀请回答
-

2条回答 默认 最新

 关注
关注- 这有个类似的问题, 你可以参考下: https://ask.csdn.net/questions/7778163
- 我还给你找了一篇非常好的博客,你可以看看是否有帮助,链接:人工智能AI中关于数据标注标签处理的工具集锦
- 除此之外, 这篇博客: 对图像直方图的理解中的 直方图均衡的目的是为了使灰度分布的更广泛,从而来拉伸对比度。 部分也许能够解决你的问题, 你可以仔细阅读以下内容或跳转源博客中阅读:
有两个问题比较难懂,一是为什么要选用累积分布函数,二是为什么使用累积分布函数处理后像素值会均匀分布。
第一个问题。均衡化过程中,必须要保证两个条件:①像素无论怎么映射,一定要保证原来的大小关系不变,较亮的区域,依旧是较亮的,较暗依旧暗,只是对比度增大,绝对不能明暗颠倒;②如果是八位图像,那么像素映射函数的值域应在0和255之间的,不能越界。综合以上两个条件,累积分布函数是个好的选择,因为累积分布函数是单调增函数(控制大小关系),并且值域是0到1(控制越界问题),所以直方图均衡化中使用的是累积分布函数。
第二个问题。累积分布函数具有一些好的性质,那么如何运用累积分布函数使得直方图均衡化?比较概率分布函数和累积分布函数,前者的二维图像是参差不齐的,后者是单调递增的。直方图均衡化过程中,映射方法是
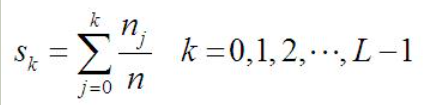
其中,n是图像中像素的总和,
 是当前灰度级的像素个数,L是图像中可能的灰度级总数。
是当前灰度级的像素个数,L是图像中可能的灰度级总数。来看看通过上述公式怎样实现的拉伸。假设有如下图像:
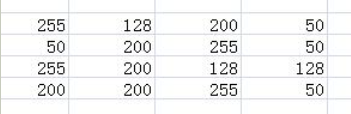
得图像的统计信息如下图所示,并根据统计信息完成灰度值映射:

直方图均衡化参考链接:https://www.cnblogs.com/tianyalu/p/5687782.html
- 您还可以看一下 CSDN讲师老师的AI出入证-人工智能助力疾控复工课程中的 复杂网络技术可以构建跨多度连接、多种关联关系的图数据库数据服务小节, 巩固相关知识点
- 以下回答由chatgpt基于相关博客总结生成:
针对动态场景中移动物体的检测问题,建议使用运动目标检测(Moving Object Detection)方法。常用的运动目标检测方法包括基于光流的方法、基于帧差法的方法、基于背景建模的方法等。由于使用了背景减法的方法在动态背景下不起作用,可以考虑使用基于光流的方法或基于帧差法的方法进行处理。
基于光流的方法可以用来检测局部区域的运动物体,具体步骤如下:
- 对连续的两帧图像计算稠密光流场;
- 对光流场进行聚类,将与物体运动相关的光流聚为一类;
- 根据运动物体的形态特征,如运动轨迹、大小、形状等,抽取运动目标,并进行跟踪。
参考代码:
#include <opencv2/opencv.hpp> using namespace cv; using namespace std; int main() { VideoCapture cap(0); //打开摄像头 Mat frame, preFrame, grayFrame, preGrayFrame; vector<uchar> status; vector<float> err; //输入输出光流图像 Mat flow, cflow; Mat img, img0; //创建随机颜色 vector<Scalar> colors; RNG rng; for (int i = 0; i < 100; i++) colors.push_back(Scalar(rng.uniform(0, 255), rng.uniform(0, 255), rng.uniform(0, 255))); //循环处理视频流 while (waitKey(30) != 27) { cap >> frame; if (frame.empty()) break; cvtColor(frame, grayFrame, COLOR_BGR2GRAY); if (!preGrayFrame.empty()) { calcOpticalFlowFarneback(preGrayFrame, grayFrame, flow, 0.5, 3, 15, 3, 5, 1.2, 0); cvtColor(preGrayFrame, cflow, COLOR_GRAY2BGR); //计算运动物体的边界矩形 vector<vector<Point>> contour; vector<Vec4i> hierarchy; findContours(threshold, contour, hierarchy, RETR_CCOMP, CHAIN_APPROX_SIMPLE); for (int i = 0; i < contour.size(); i++) { Rect box = boundingRect(contour[i]); rectangle(cflow, box, colors[i % 100], 2); } imshow("optical_flow", cflow); } preGrayFrame = grayFrame.clone(); } return 0; }基于帧差法的方法可以用来检测全局区域的运动物体,具体步骤如下:
- 选取参考帧;
- 对当前帧与参考帧进行帧差计算,得到差分帧;
- 对差分帧进行阈值划分,得到二值图像;
- 对二值图像进行形态学操作,对噪点进行滤除,得到物体轮廓;
- 对物体轮廓进行聚类,提取运动目标。
参考代码:
#include <opencv2/opencv.hpp> using namespace cv; using namespace std; int main() { VideoCapture cap(0); //打开摄像头 Mat frame, preFrame, grayFrame, preGrayFrame, diffFrame, threshold; //循环处理视频流 while (waitKey(30) != 27) { cap >> frame; if (frame.empty()) break; cvtColor(frame, grayFrame, COLOR_BGR2GRAY); if (!preGrayFrame.empty()) { //帧差计算 absdiff(preGrayFrame, grayFrame, diffFrame); //二值化处理 threshold(diffFrame, threshold, 30, 255, THRESH_BINARY); //形态学处理 Mat element = getStructuringElement(MORPH_RECT, Size(5, 5)); morphologyEx(threshold, threshold, MORPH_OPEN, element); //轮廓分析 vector<vector<Point>> contour; vector<Vec4i> hierarchy; findContours(threshold, contour, hierarchy, RETR_CCOMP, CHAIN_APPROX_SIMPLE); for (int i = 0; i < contour.size(); i++) { Rect box = boundingRect(contour[i]); rectangle(frame, box, Scalar(0, 0, 255), 2); } imshow("frame", frame); imshow("threshold", threshold); } preGrayFrame = grayFrame.clone(); } return 0; }
解决 无用评论 打赏举报 分享
- 2025-08-09 13:12xcLeigh的博客 动态场景解析:移动物体与静态背景分离 ,人工智能,计算机视觉,大模型,AI,本文详细解析了动态场景中移动物体与静态背景分离技术。介绍了基本概念、关键技术如背景建模(帧差法、混合高斯模型)和前景检测,...
- 2025-09-29 08:46实验在模拟厨房环境中验证了方法的有效性,展示了其在动态家庭服务场景中的应用潜力。本书为服务机器人在复杂室内环境中的智能感知与决策提供了创新解决方案,推动了可解释人工智能在机器人领域的落地。
- 2025-03-17 20:28CarlowZJ的博客 图像识别是人工智能领域中最令人兴奋的技术之一,它使计算机能够自动识别和理解图像中的内容。从简单的物体检测到复杂的场景理解,图像识别技术已经广泛应用于医疗、安防、自动驾驶等多个领域。本文将从图像识别的...
- 2021-09-19 07:226. **智能决策**:结合人工智能和机器学习,可以让物体根据环境变化和用户行为动态调整路径,实现智能化的移动策略。这可以提高场景的真实感,同时降低不必要的计算负载。 7. **多目标优化**:在实际应用中,路径...
- 2025-08-14 02:34移动设备端对物体识别技术的发展历程与现状 随着移动计算技术的不断进步,移动设备端的...未来,随着技术的进步和应用的深入,物体识别技术将在移动设备上发挥更大的作用,推动移动互联网和人工智能技术的深度融合。
- 2022-05-27 09:35人工智能-机器学习-移动机器人基于三维激光测距的物体检测 本文研究了移动机器人在室内三维环境中的场景认知问题,主要解决了室内场景中的物体检测问题。为此,文中提出了一种基于三维激光测距的物体检测方法,通过...
- 2023-04-15 23:52-初心不负-的博客 本文实现的是用在UE4 中用鼠标旋转场景中的物体,点击到物体时开始物体旋转功能,移动鼠标物体跟着旋转相应的角度,松开鼠标左键物体停止旋转,下面介绍实现此功能的蓝图逻辑。由于比较简单就不一一介绍了,直接贴上...
- 2025-12-15 22:07至顶AI实验室的博客 浙大突破:AI实现动态环境空间关系理解
- 2025-08-14 14:34普蓝机器人的博客 普蓝机器人的移动机器人底盘,凭借卓越的性能和强大的可扩展性,成为 ROS 教育、AI 教育、机器视觉及大模型应用领域二次开发的理想工具,广泛适配多种场景,为大学、科研院所等机构提供了无限的创新可能。在 AI 教育...
- 2024-04-04 13:006. 动态物体识别:服务机器人需识别并避开动态障碍物,如行人或移动的物体。通过物体检测和跟踪算法,结合深度信息,可以更准确地识别和预测动态物体的行为。 7. 移动避障:结合深度信息,机器人可以实时构建局部...
- 没有解决我的问题, 去提问


问题事件
 创建了问题
5月9日
创建了问题
5月9日