让阿豪来帮你解答,本回答参考chatgpt3.5编写提供,如果还有疑问可以评论或留言
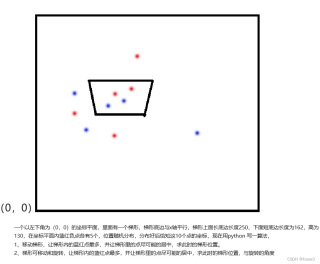
1、移动梯形
首先找出梯形的中心点,即长底边和短底边的中点的连线的中点。然后将梯形沿着x轴和y轴分别以一个步长的距离移动,计算移动后梯形内蓝点和红点的数量,以及中心点的距离,保存最优位置和最优数量。最后返回最优位置。
代码示例:
import random
# 随机生成10个点的坐标
points = [(random.uniform(0, 250), random.uniform(0, 130)) for _ in range(5)] + [(random.uniform(0, 162), random.uniform(0, 130)) for _ in range(5)]
# 梯形左下角坐标
x0, y0 = 0, 0
# 梯形长底边、短底边、高
L, l, h = 250, 162, 130
# 计算梯形中心点坐标
center_x = (L + l) / 2 + x0
center_y = h / 2 + y0
# 定义步长
step = 1
# 初始化最优值
best_score = -1
best_position = None
# 循环移动梯形
for dx in range(-step, step+1):
for dy in range(-step, step+1):
new_x0, new_y0 = x0 + dx, y0 + dy
# 判断梯形是否越界
if new_x0 + l > 250 or new_y0 + h > 130:
continue
# 计算移动后梯形内蓝点和红点的数量、中心点距离
blue_count = red_count = 0
center_distance = 0
for point in points:
x, y = point
if new_x0 <= x <= new_x0 + l and new_y0 <= y <= new_y0 + h:
if points.index(point) < 5:
blue_count += 1
else:
red_count += 1
center_distance += ((x + new_x0 - center_x) ** 2 + (y + new_y0 - center_y) ** 2) ** 0.5
# 更新最优位置和最优数量
score = min(blue_count, red_count)
if score > best_score or (score == best_score and center_distance < best_center_distance):
best_score = score
best_center_distance = center_distance
best_position = (new_x0, new_y0)
print("移动后位置:", best_position)
2、移动与旋转梯形 在移动梯形的基础上,添加旋转角度的计算。每次将梯形沿着x轴、y轴和某一斜线旋转一个角度,计算移动后梯形内蓝点和红点的数量,以及中心点的距离,保存最优位置和最优数量。最后返回最优位置和最优角度。 代码示例:
import random
import math
# 随机生成10个点的坐标
points = [(random.uniform(0, 250), random.uniform(0, 130)) for _ in range(5)] + [(random.uniform(0, 162), random.uniform(0, 130)) for _ in range(5)]
# 梯形左下角坐标
x0, y0 = 0, 0
# 梯形长底边、短底边、高
L, l, h = 250, 162, 130
# 计算梯形中心点坐标
center_x = (L + l) / 2 + x0
center_y = h / 2 + y0
# 定义步长和角度步长
step = 1
angle_step = 1
# 初始化最优值
best_score = -1
best_position = None
best_angle = None
# 循环移动与旋转梯形
for dx in range(-step, step+1):
for dy in range(-step, step+1):
for angle in range(-45, 45+1, angle_step):
# 计算旋转后梯形的四个顶点坐标
angle_rad = angle * math.pi / 180
x1, y1 = x0 + L * math.cos(angle_rad), y0 + L * math.sin(angle_rad)
x2, y2 = x1 - (L - l) * math.sin(angle_rad), y1 + (L - l) * math.cos(angle_rad)
x3, y3 = x2 - l * math.cos(angle_rad), y2 - l * math.sin(angle_rad)
# 计算旋转后梯形的中心点坐标
center_x = (x0 + x1 + x2 + x3) / 4
center_y = (y0 + y1 + y2 + y3) / 4
# 判断梯形是否越界
if min(x0, x1, x2, x3) < 0 or max(x0, x1, x2, x3) > 250 or min(y0, y1, y2, y3) < 0 or max(y0, y1, y2, y3) > 130:
continue
# 计算移动、旋转后梯形内蓝点和红点的数量、中心点距离
blue_count = red_count = 0
center_distance = 0
for point in points:
x, y = point
# 计算旋转后点的坐标
x_rot = x * math.cos(angle_rad) + y * math.sin(angle_rad)
y_rot = -x * math.sin(angle_rad) + y * math.cos(angle_rad)
if x_rot >= x0 and x_rot <= x1 and y_rot >= y0 and y_rot <= y2:
if points.index(point) < 5:
blue_count += 1
else:
red_count += 1
center_distance += ((x_rot - center_x) ** 2 + (y_rot - center_y) ** 2) ** 0.5
# 更新最优位置和最优数量
score = min(blue_count, red_count)
if score > best_score or (score == best_score and center_distance < best_center_distance):
best_score = score
best_center_distance = center_distance
best_position = (x0+dx, y0+dy)
best_angle = angle
print("移动后位置:", best_position)
print("旋转后角度:", best_angle)