准心相对于摄像机静止的数学原理是什么?
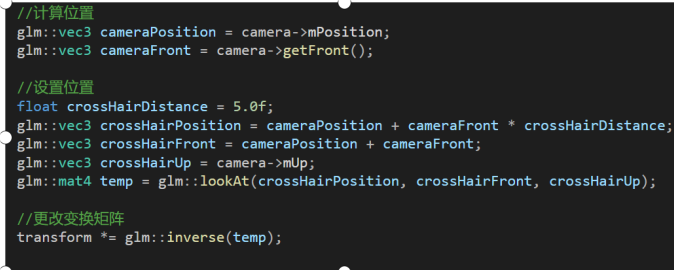
下面是我的准心逻辑代码,目前只会用,不知道其具体的数学原理。

准心相对于摄像机静止的数学原理是什么?
下面是我的准心逻辑代码,目前只会用,不知道其具体的数学原理。
 分享
分享
阿里嘎多学长整理AIGC生成,因移动端显示问题导致当前答案未能完全显示,请使用PC端查看更加详细的解答过程
准心相对于摄像机静止的原理是基于摄像机的视锥体模型和投影变换的。摄像机的视锥体模型将三维空间中的点投影到二维平面上,形成一个视锥体。准心是指摄像机的中心点,它是视锥体的中心。
准心相对于摄像机静止的数学原理可以用以下公式表示:
Δx = p.x - cx Δy = p.y - cy
其中Δx和Δy是准心相对于摄像机静止的水平和竖直偏移量。
以下是一个简单的C++代码示例,演示了准心相对于摄像机静止的计算:
void calculateCameraOffset(float3 p, float3 cx, float3 cy, float3 cz, float2& offset) {
offset.x = p.x - cx.x;
offset.y = p.y - cy.y;
}
这个函数将三维点P投影到二维平面上,并计算准心相对于摄像机静止的偏移量Δx和Δy。
分享 创建了问题
4月15日
创建了问题
4月15日

