
因为加速度计和磁力计存在高频误差,需要低通滤波器来输出准确的数据,陀螺仪存在低频误差,需要进行高通滤波,但是我看了CSDN上的帖子,也没帖子明确这些滤波的截止频率,所以想来这请教一下各位。
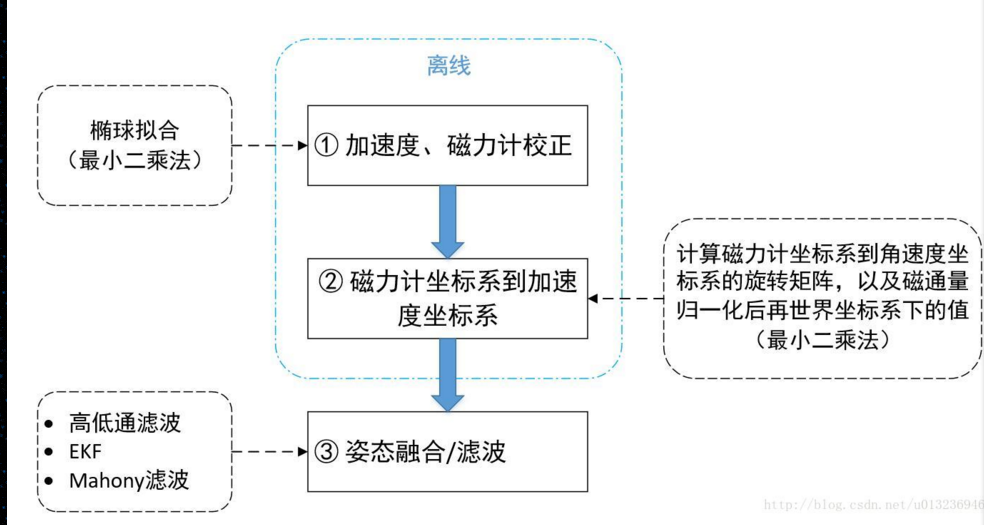
这个是我在帖子上看到的关于mpu9250解算姿态的流程,我最后的姿态融合用的是AHRS算法,进行了磁力计的补偿,但是不知道这种情况下还需要进行第二步(磁力计坐标系到加速度坐标系)吗?需要的画,相关的资料哪位大哥有啊,有的话能提供一下吗?救救老弟吧,真的谢谢了。
下面是我用的AHRS算法代码:
// 加速度计、地磁计、陀螺仪数据融合,更新四元数
/*
[gx,gy,gz]为陀螺仪的测量值
[ax,at,az]为加速度的测量值
[mx,my,mz]为地磁计的测量值
*/
void AHRSupdate(float gx, float gy, float gz, float ax, float ay, float az, float mx, float my, float mz)
{
float norm;
float hx, hy, hz, bx, bz;
float vx, vy, vz, wx, wy, wz;
float ex, ey, ez;
// 定义一些辅助变量用于转换矩阵
float q0q0 = q0*q0;
float q0q1 = q0*q1;
float q0q2 = q0*q2;
float q0q3 = q0*q3;
float q1q1 = q1*q1;
float q1q2 = q1*q2;
float q1q3 = q1*q3;
float q2q2 = q2*q2;
float q2q3 = q2*q3;
float q3q3 = q3*q3;
// 归一化加速度计和地磁计的度数
norm = sqrt(ax*ax + ay*ay + az*az);
ax = ax / norm;
ay = ay / norm;
az = az / norm;
norm = sqrt(mx*mx + my*my + mz*mz);
mx = mx / norm;
my = my / norm;
mz = mz / norm;
//将b系中的地磁计分量[mx,my,mz]转换到n系,得到[hx,hy,hz]
hx = 2*mx*(0.5 - q2q2 - q3q3) + 2*my*(q1q2 - q0q3) + 2*mz*(q1q3 + q0q2);
hy = 2*mx*(q1q2 + q0q3) + 2*my*(0.5 - q1q1 - q3q3) + 2*mz*(q2q3 - q0q1);
hz = 2*mx*(q1q3 - q0q2) + 2*my*(q2q3 + q0q1) + 2*mz*(0.5 - q1q1 - q2q2);
//得到n系中的地磁向量的真实值[bx,bz,by],其中by=0
bx = sqrt((hx*hx) + (hy*hy));
bz = hz;
//n系中的地磁向量[bx,by,bz]转换到b系中,得到[wx,wy,wz]
wx = 2*bx*(0.5 - q2q2 - q3q3) + 2*bz*(q1q3 - q0q2);
wy = 2*bx*(q1q2 - q0q3) + 2*bz*(q0q1 + q2q3);
wz = 2*bx*(q0q2 + q1q3) + 2*bz*(0.5 - q1q1 - q2q2);
//n系中重力加速度[0,0,1]转换到b系中得到三个分量[vx,vy,vz]
vx = 2*(q1q3 - q0q2);
vy = 2*(q0q1 + q2q3);
vz = q0q0 - q1q1 - q2q2 + q3q3;
//计算[wx,wy,wz] X [mx,my,mz],[ax,at,az] X [vx,vy,vz],得到两个误差后求和
ex = (ay*vz - az*vy) + (my*wz - mz*wy);
ey = (az*vx - ax*vz) + (mz*wx - mx*wz);
ez = (ax*vy - ay*vx) + (mx*wy - my*wx);
//PI控制器中的积分部分
exInt = exInt + ex*Ki* (1.0f / sampleFreq);
eyInt = eyInt + ey*Ki* (1.0f / sampleFreq);
ezInt = ezInt + ez*Ki* (1.0f / sampleFreq);
//误差经过PI控制器后输出,然后补偿到角速度的三个分量,Kp、Ki是需要调节的参数
gx = gx + Kp*ex + exInt;
gy = gy + Kp*ey + eyInt;
gz = gz + Kp*ez + ezInt;
//一阶龙格库塔法更新四元数
q0 = q0 + (-q1*gx - q2*gy - q3*gz)*halfT;
q1 = q1 + (q0*gx + q2*gz - q3*gy)*halfT;
q2 = q2 + (q0*gy - q1*gz + q3*gx)*halfT;
q3 = q3 + (q0*gz + q1*gy - q2*gx)*halfT;
// 归一化四元数
norm = sqrt(q0*q0 + q1*q1 + q2*q2 + q3*q3);
q0 = q0 / norm;
q1 = q1 / norm;
q2 = q2 / norm;
q3 = q3 / norm;
}






