为什么Simulink明明什么仪器都没动30s和60s仿真scope显示结果完全不一样了
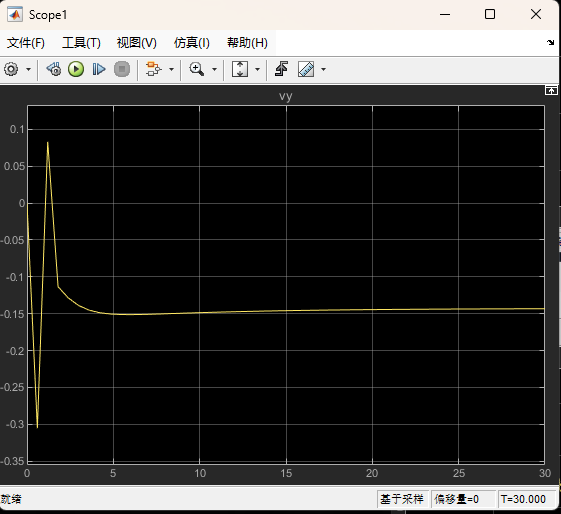
30s的样子
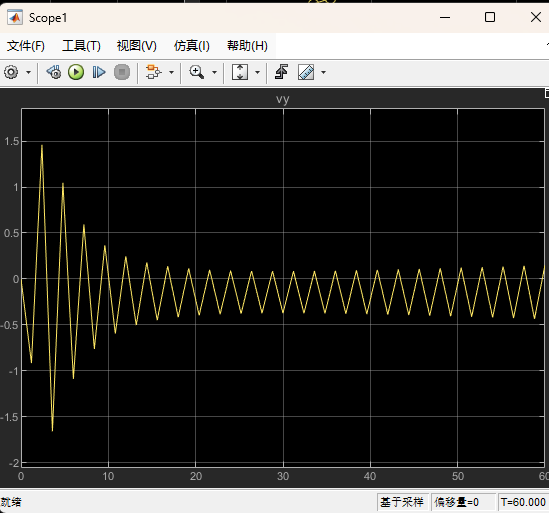
60s的样子

为什么Simulink明明什么仪器都没动30s和60s仿真scope显示结果完全不一样了
30s的样子
60s的样子
 分享
分享
上午好☀️☀️☀️️
本答案参考通义千问
你提到在Simulink中,什么仪器都没动,但30秒和60秒的仿真结果在Scope上显示完全不同。这种情况通常不是由于“仪器”(如Scope)本身的问题,而是由以下几种常见原因导致的。下面我将详细分析可能的原因,并给出解决方案。
linearize 工具进行线性化分析。fixed-step 设置为 1e-3 或更小)。auto 或 ode45 等算法)。Model Configuration Parameters 中调整 Solver 设置。Initial Condition 模块)。Model Configuration Parameters 中查看 Initial Conditions 是否一致。Random Number 模块),那么每次仿真都会产生不同的结果。Random Number 模块中设置固定的种子(Seed)。Repeatable Random Number 模块确保每次仿真结果一致。sim('model_name', 'StopTime', '30') 和 sim('model_name', 'StopTime', '60') 来分别运行。Data Inspector 功能,对比 30s 和 60s 的数据差异。如果你使用了 MATLAB Function Block 并且希望重置状态,可以参考如下代码:
function y = myFunction(u)
% Initialize state
persistent state;
if isempty(state)
state = 0; % 初始状态
end
% Process input
state = state + u; % 示例:简单的积分
y = state;
如果你希望每次运行时重置状态,可以添加一个 reset 输入端口:
function y = myFunction(u, reset)
% Initialize state
persistent state;
if isempty(state) || reset
state = 0; % 重置状态
end
% Process input
state = state + u;
y = state;
然后在 Simulink 中连接一个 Constant 模块作为 reset 信号,设置为 1 表示重置。
| 原因 | 解决方案 | |------|----------| | 状态记忆模块(如 Integrator) | 重置初始条件或添加 Reset 信号 | | 系统不稳定 | 检查极点或调整控制器参数 | | 仿真步长过大 | 使用更小步长或自适应步长 | | 随机信号源 | 设置固定种子或使用 Repeatable Random Number | | 多次仿真未重置 | 手动重置模型或使用 Clear Simulation Data |
如果你能提供具体的模型结构或部分截图,我可以进一步帮你定位问题!
分享 创建了问题
5月8日
创建了问题
5月8日


