使用turtlebot2和kinect2相机做机器人导航的时候输入roslaunch kinect2_nav.launch之后报了下面这个错误,应该怎么解决呢?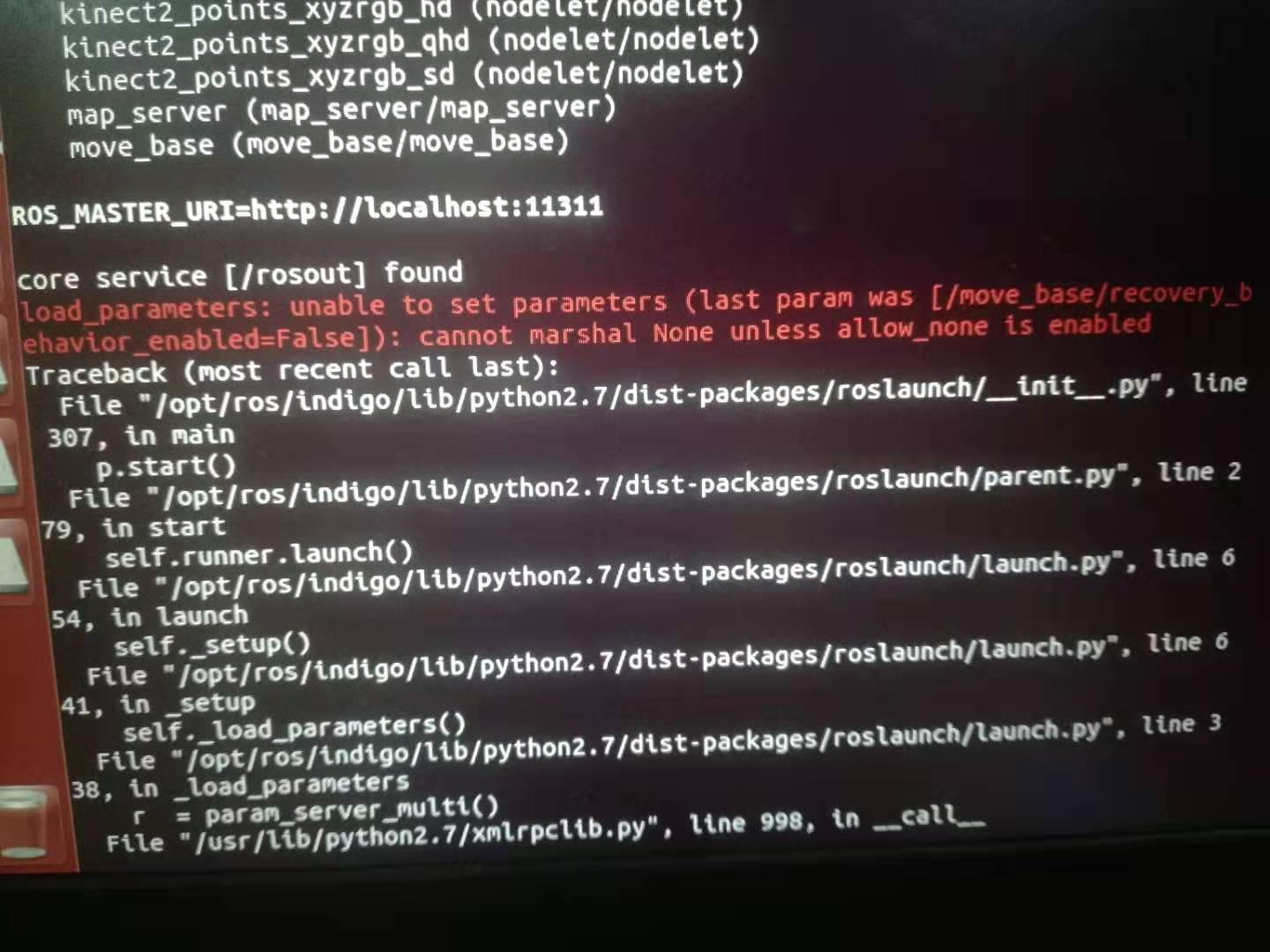

turtlebot2导航输入roslaunch kinect2_nav.launch报错unable to set parameters(last param was[move_base/recovery_behavior_enabled=false])请问应该怎么办

- 写回答
- 好问题 0 提建议
- 追加酬金
- 关注问题
 分享
分享- 邀请回答
-


1条回答 默认 最新

- 2019-04-02 18:28回答 1 已采纳 https://blog.csdn.net/rezrezre/article/details/74990433
- 2022-09-26 00:17回答 3 已采纳 看下这篇博客,也许你就懂了,链接:Unity-显示Kinect深度数据
- 2022-08-01 18:13回答 1 已采纳 在程序中使用的基本过程为 使用 Kinect Studio 录制后缀名为 .xrf 或者 .xef 的姿势数据文件使用 Visual Gesture Builder 基于 Kinect Studio
- 2024-02-23 20:38CHNNNNNNNN的博客 我详细记录我遇到的问题,首先工作空间,功能包编译没有问题,已经source,然后rosluanch, roslaunch和mbot_gazebo,可以tab,但是launch文件tab不出来。期间我没有做什么修改,尝试了cd到对应的功能包的launch...
- 2023-02-20 16:17回答 1 已采纳 1、硬件连接问题:请确保Kinect设备正确连接到计算机的USB端口上,也可以尝试更换USB端口。2、缺少Kinect驱动程序:如果计算机中没有安装Kinect驱动程序,将无法识别设备。你可以从微软官
- 2022-04-15 16:58回答 1 已采纳 1.编码后推流,可以先把编码后的数据保存成文件,看看能不能正常播放2.ffmpeg推流,可以手动把sps和pps加上试试(一般情况下I帧自带sps和pps)
- 2016-04-05 14:54回答 2 已采纳 可惜没有想要的答案,已转战Ubuntu的openni
- 2016-11-17 16:25最先启动:roslaunch kinect2_bridge kinect2_bridge.launch 之后启动:roslaunch [路径] turtlebot_fake_laser_openni2_v2.launch 2、安装 ros by example(indigo) 的例程: sudo apt-get install ros-indigo-...
- 2017-11-02 04:45回答 3 已采纳 卸载了再装。。我电脑也是win10装了没问题啊。尽管我不是搞c的
- 2017-07-09 08:52回答 1 已采纳 高版本的软件对硬件有最低要求。 对Kinect SDK 2.0,其对硬件的最低要求如下: ``` 64-bit (x64) processor Phys
- 2016-03-08 12:00回答 5 已采纳 照片传不上去。第三张图片是:最后一项测试彩色流和深度流的前面是叉号❌
- 2020-10-27 21:15xuan196的博客 预备知识 一些标签的含义可以参考: ... $(env TURTLEBOT_GAZEBO_WORLD_FILE) # env 环境变量 因为后面没有默认值 在终端下必须对TURTLEBOT_GAZEBO_WORLD_... #optional environment,TURTLEBOT_BASE环境变量,值为kobuki
- 2015-07-31 07:07回答 2 已采纳 目前不支持中文,用发音类似的英文看看
- 2019-06-23 18:57teddyluo的博客 文章目录Turtlebot 2e 导航之`move_base` 参数详解`move_base`的启动`move_base.launch.xml`的内容速度平滑功能包`velocity_smoother.launch.xml`订阅的主题发布的主题参数参数配置文件`smoother.yaml`其他安全驾驶`...
- 2020-07-28 17:26qsl56789的博客 一、turtlebot2 // An highlighted block roscore // An highlighted block roslaunch turtlebot_bringup minimal.launch // kinect显示图像 roslaunch freenect_launch freenect-registered-xyzrgb.launch rosrun...
- 没有解决我的问题, 去提问



悬赏问题
- ¥50 comfyui下连接animatediff节点生成视频质量非常差的原因
- ¥20 有关区间dp的问题求解
- ¥15 多电路系统共用电源的串扰问题
- ¥15 slam rangenet++配置
- ¥15 有没有研究水声通信方面的帮我改俩matlab代码
- ¥15 对于相关问题的求解与代码
- ¥15 ubuntu子系统密码忘记
- ¥15 信号傅里叶变换在matlab上遇到的小问题请求帮助
- ¥15 保护模式-系统加载-段寄存器
- ¥15 电脑桌面设定一个区域禁止鼠标操作