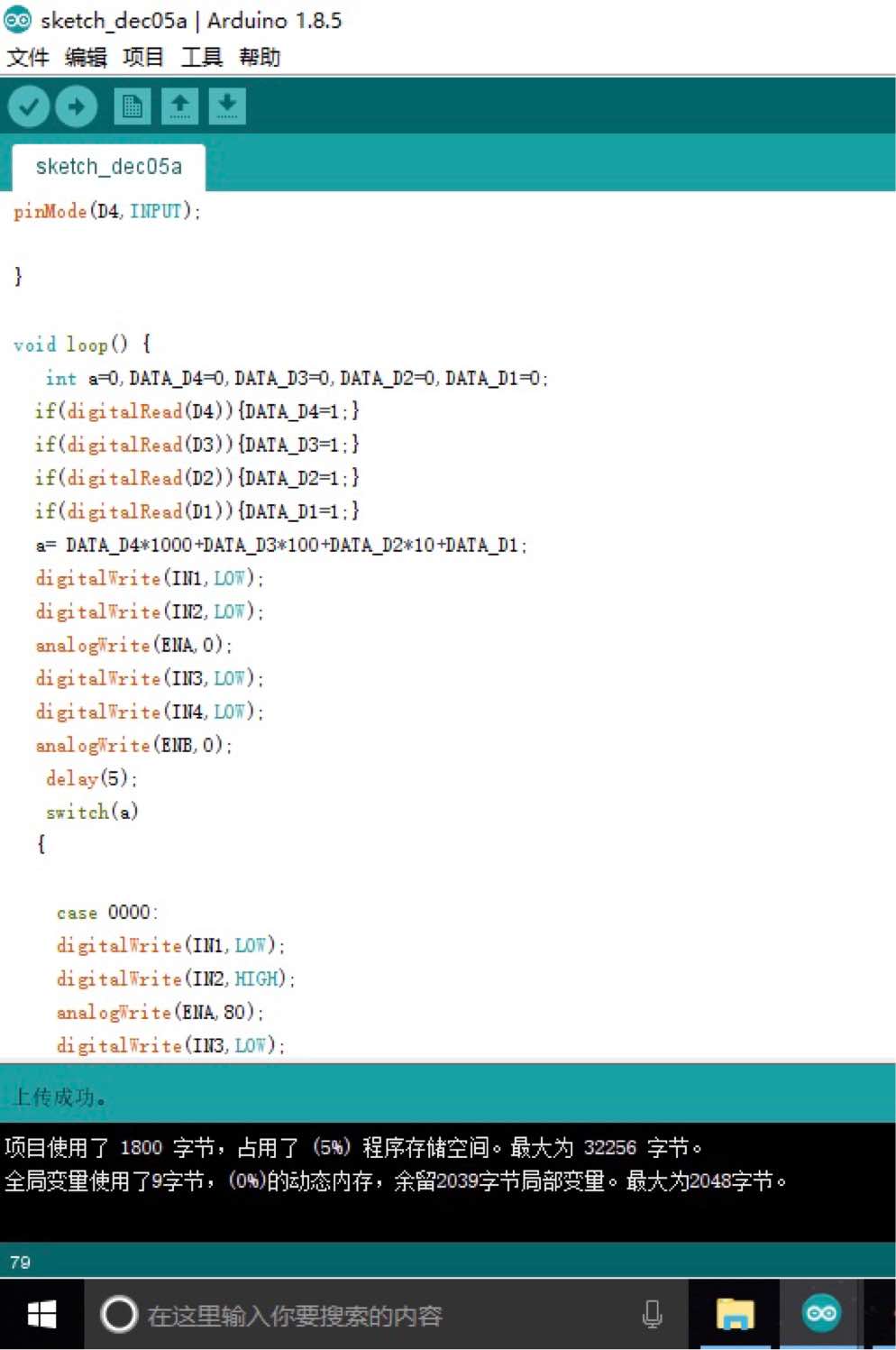
能帮我看一下这段代码吗?实体是个小车,主机是Arduino,驱动是L298N,四路循迹模块四路分别用D1D2D3D4表示,ENA、ENB、IN1到IN4这些连的引脚就是程序上定义的,马达是在网上常见的减速马达。
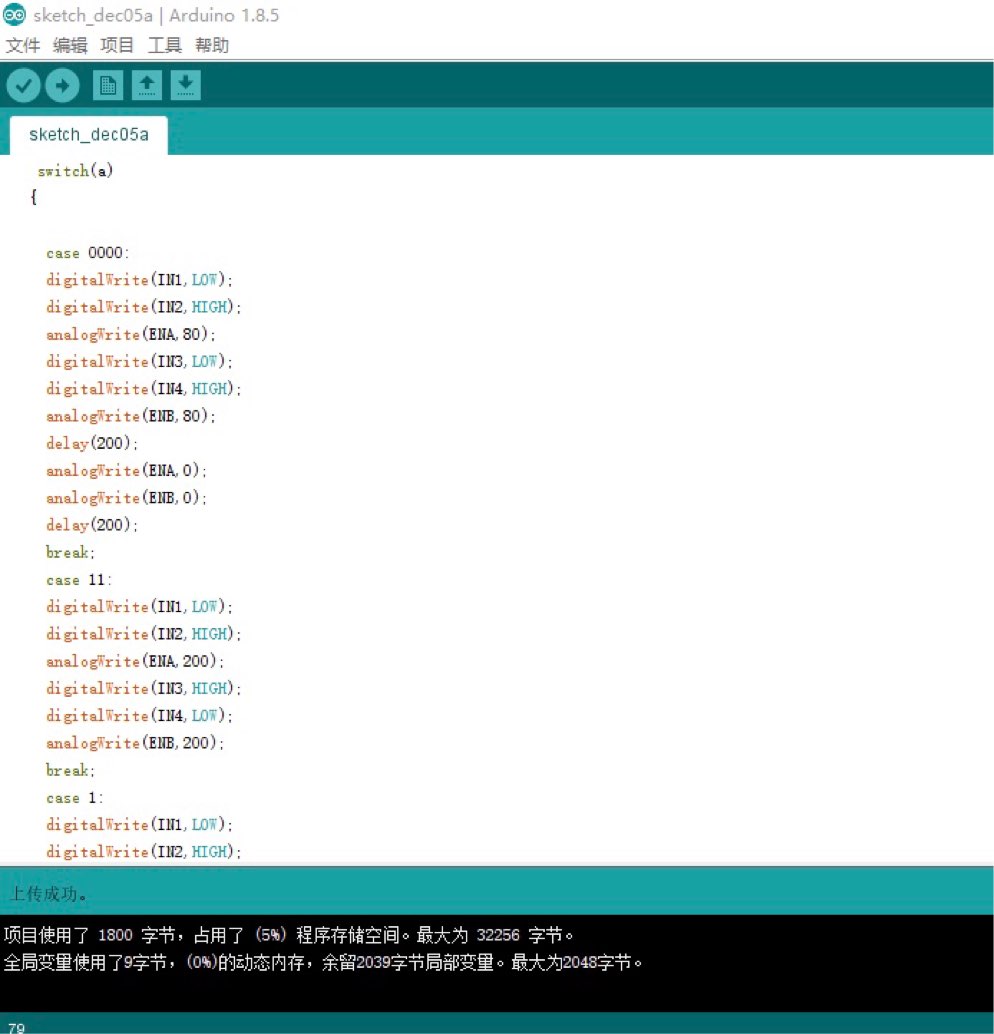
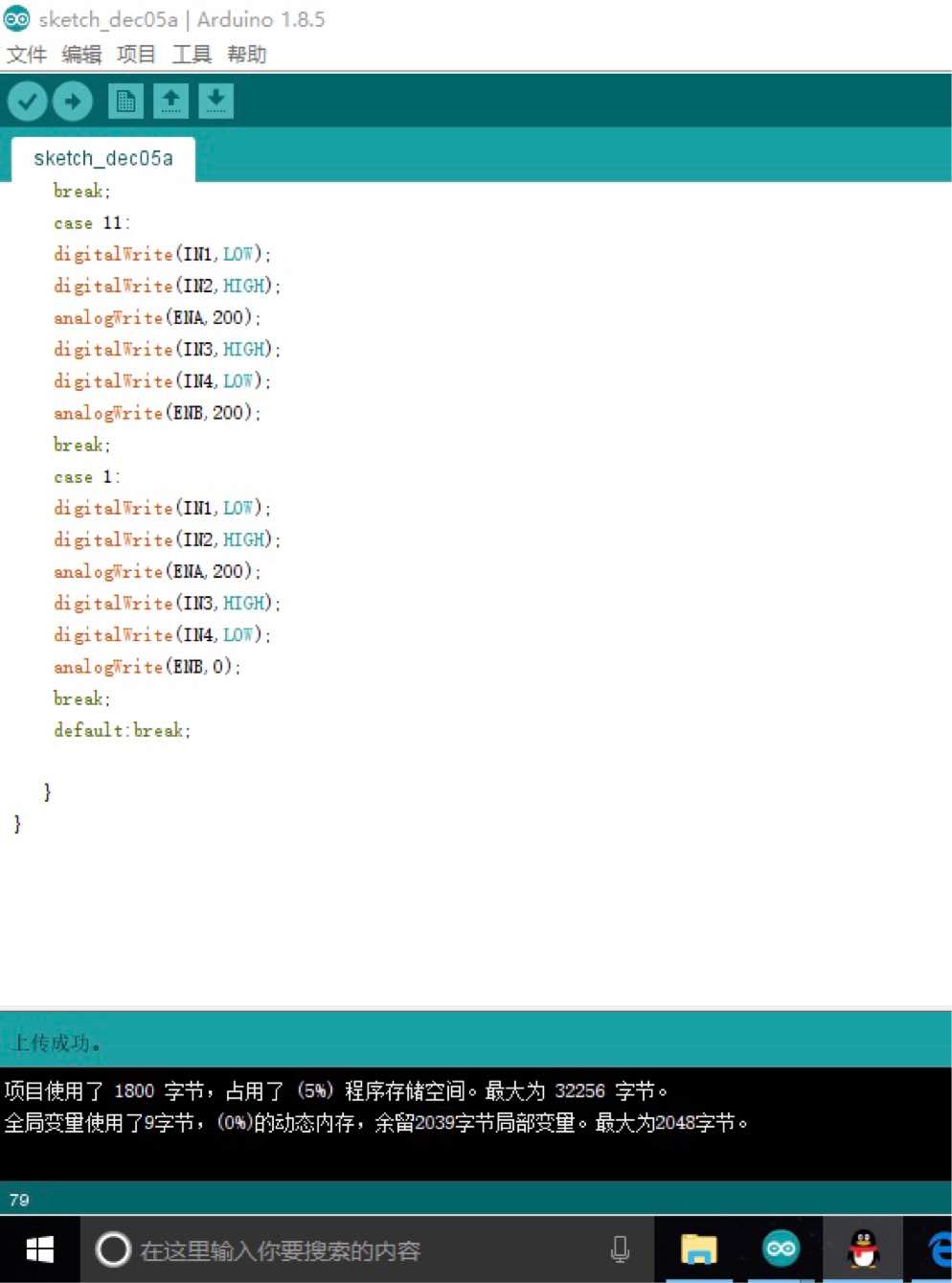
四个红外模块都是0即a=0000的时候,小车按照程序走,但是a=1或者a=11的时候就不转了,而且L298N还发出嗡嗡的声音。
找了半天了,就是找不到是什么情况,线接的没问题。

Arduino小车 循迹 L298N

- 写回答
- 好问题 0 提建议
- 追加酬金
- 关注问题
 分享
分享- 邀请回答
-


1条回答 默认 最新

- 2022-02-18 16:11回答 1 已采纳 可以使用另外一个电源,用 续电器,晶体管 或者 驱动模组 控制。
- 2023-03-17 13:24回答 2 已采纳 分开来单独调试,比如说调试下车轮,转向,看看是哪一个部分的问题
- 2021-08-15 19:57回答 1 已采纳 注意!因为不知道你的电机是多少步的,所以是假设步距角3°来编程的。如果转的角度不是180°,请修改 setup 里的 n=60; 。如果大于180°,就把n试着改小;如果小于180°,就把n改大。
- 2022-01-09 16:14该程序源代码用于Arduino智能小车循迹+测速实验。 1、源代码开发软件:Arduino IDE; 2、程序对应处理器是:ATMEGA328P; 3、智能小车电机驱动芯片是:L293D; 4、智能小车电机为:TT直流减速电机; 5、需要用到测速...
- 2022-07-17 20:31回答 2 已采纳 最后看到这篇文章,解决了,非常感谢原作者:https://blog.csdn.net/qq_37281984/article/details/122279342
- 2023-01-10 23:51回答 1 已采纳 代码没看到不清楚是不是对的,如果是百分百对,那就是板子的问题了
- 2022-11-07 11:44回答 2 已采纳 去掉void sendJasonData()后边的分号
- 2021-11-29 20:50arduino小车循迹,
- 2017-11-24 15:08回答 1 已采纳 最好找传感器厂商要接口, 想了解原理的话读一下dht的库源代码就好了, 很好理解的. ```C int dht11::read(int pin) { // BUFFER TO R
- 2022-04-24 18:53回答 1 已采纳 提示是找不到 OneWire库,装一下这个库就可以了
- 2022-10-15 16:04回答 1 已采纳 请看👉 :Arduino开发板上传程序失败的解决办法
- 2021-12-24 14:43arduino循迹小车——红外循迹代码,电机驱动模块:L298N
- 2022-06-18 08:21回答 2 已采纳 SR04.h内容改为 #ifndef SR04_H #define SR04_H # if defined(ARDUINO)&&ARDUINO >= 100 #incl
- 2017-09-04 11:57不懂音乐的欣赏者的博客 Arduino智能小车——循迹篇 相信大家都在网上看到过类似下图这样的餐厅服务机器人,或者仓库搬运机器人,但是你们有没有注意到图片中地上的那条黑线?没错,他们都是沿着这条黑线来行进的,在这一篇将教大家...
- 2021-06-25 20:17superburrry的博客 基于Arduino的循迹小车 前言 该小车采用Arduino UNO主控制核心,通过传感器传来的信号,对当前环境作出判断,最后对电机做出相应的动作。单片机通过红外传感器检测场地...然后由Arduino UNO通过IO口控制L298N驱动模板
- 没有解决我的问题, 去提问


