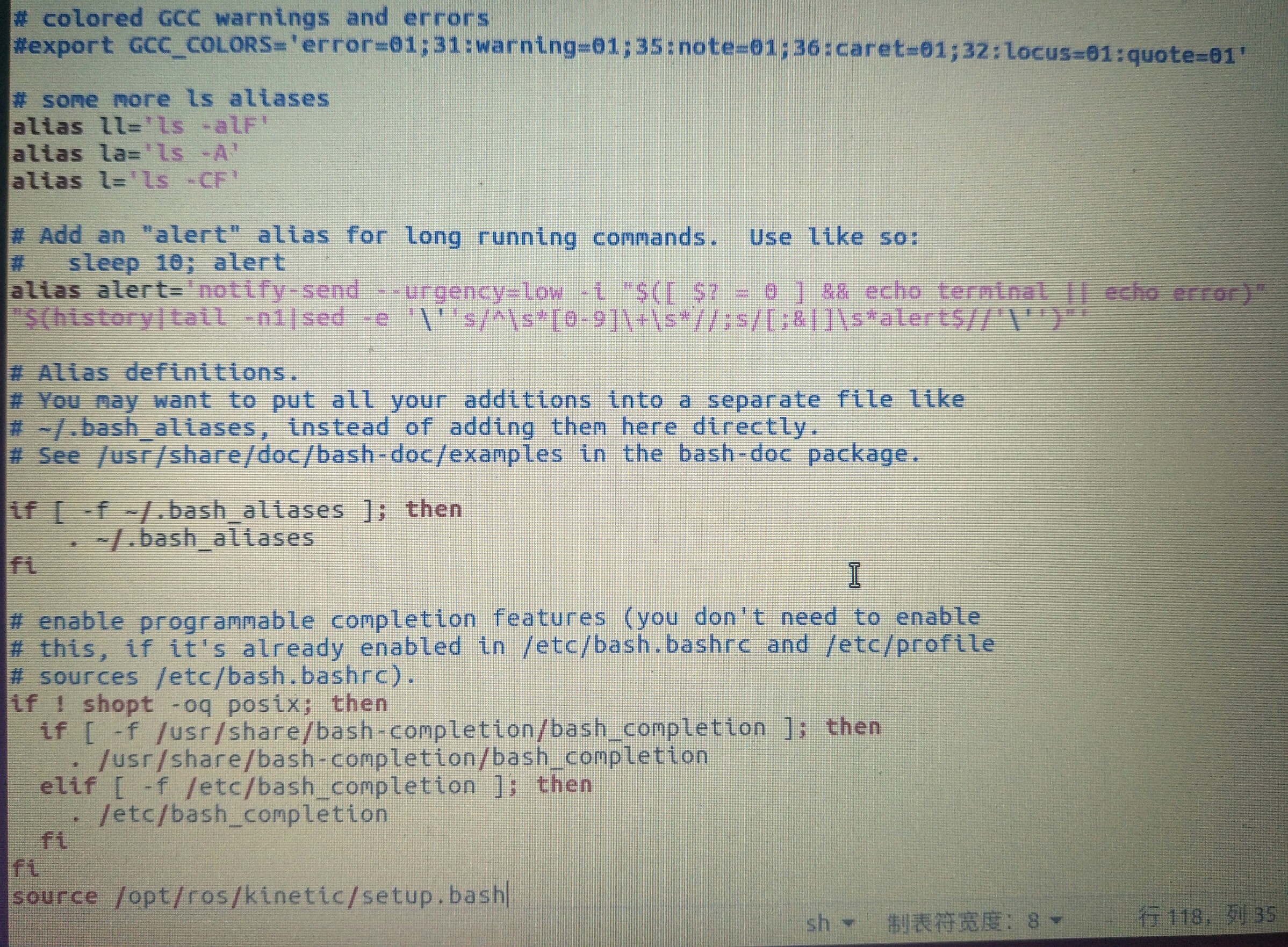
自己确实是照网上说的,用gedit~/.bashrc命令检查,也更正了大小写和无关的配置,但更正错误后再次运行source~/.bashrc时,还是会出现同样的问题。是不是我真的没有/opt/ros/kinetic/setup这个文件啊?因为我记得我之前有几个软件包下载失败了(猜测)
运行gedit~/.bashrc后的结果如下:

进行ROS kinetic环境配置时显示:bash:/opt/ros/kinetic/setup.bash:没有那个文件或目录?

- 写回答
- 好问题 0 提建议
- 追加酬金
- 关注问题
 分享
分享- 邀请回答
-


3条回答 默认 最新
- 2022-11-01 16:41回答 6 已采纳 没找到pcl/point_cloud.h这个头文件,要么就是没安装。要么就是路径错误所以建议找一下该文件,检查路径,如找不到,建议重新安装
- 2022-05-06 15:07回答 1 已采纳 看起来像是函数未定义,你检查一下你的CMakeLists.txt里依赖项是否添加全了,是不是有缺失
- 2022-05-17 21:15回答 1 已采纳 作用是用当前时间的纳秒+seed初始化随机数种子,之后seed自增1.
- 2023-05-21 17:54啵啵鱼爱吃小猫咪的博客 bash: /opt/ros/kinetic/setup.bash: 没有那个文件或目录
- 2022-01-18 23:46回答 3 已采纳 第一行改为这个试试: #!/usr/bin/python3 另外,这个代码文件可能需要增加可执行权限,直接chmod 777 文件名,试一试
- 2022-02-28 21:55回答 1 已采纳 ros一般采用发布和订阅进行多进程之间的通讯。
- 2022-03-06 11:21
 解决cmake报错:CMake Error: The source directory "/root/mysql" does not appear to contain CMakeLists.txt.
centos
mysql
有问必答
回答 2 已采纳 包下载错了,需要下载源码包。 [CentOS6.5]CMake Error: The source directory /data does not appear to
解决cmake报错:CMake Error: The source directory "/root/mysql" does not appear to contain CMakeLists.txt.
centos
mysql
有问必答
回答 2 已采纳 包下载错了,需要下载源码包。 [CentOS6.5]CMake Error: The source directory /data does not appear to - 2022-07-26 23:34今天是周日啊的博客 打开终端时,总是出现“ bash: /opt/ros/kinetic/setup.bash: 没有那个文件或目录”
- 2023-01-26 19:27回答 1 已采纳 望采纳!! 请把清华的镜像源更新成阿里云的: sudo vim /etc/apt/sources.list 直接使用下面的地址全部替换上面“清华大学的源”: http://mirrors.aliy
- 2021-07-06 15:41回答 4 已采纳 你的xacro文件里有中文注释,这个点可能有问题,xacro文件不允许中文注释的
- 2022-11-09 15:31回答 2 已采纳 这是由于python版本过多导致的,打开终端第一行输入以下代码即可 !/user/bin/env python<你的版本ROS使用>
- 2020-07-29 11:50阿木木的博客 bash: /opt/ros/melodic/setup.bash: 没有那个文件或目录 ==当然因为版本不同,如果是kinetic等其他版本,黄色字体会变成kinetic等对应版本 解决办法 gedit .bashrc 如果你和我一样第一次打开是空文件,不要紧,...
- 2022-09-16 15:26回答 1 已采纳 你可以把类似下面的cmake语句 qt5_add_resources(SRC_FILES resources.qrc) # normal resources 替换成 qt5_add_big_reso
- 2022-01-26 00:07「 25' h 」的博客 18.04版ubuntu终端一直出现:bash: /opt/ros/noetic/setup.bash: 没有那个文件或目录
- libliuis的博客 在Ubuntu16.04下安装ROS Kinetic 环境配置时出现bash: /opt/ros/Kinetic/setup.bash: 没有那个文件或目录 博主刚刚接触ROS系统,照着网上的教程试着安装ROS Kinetic,但是在环境配置这一环节总是出现bash: /opt/...
- 没有解决我的问题, 去提问

悬赏问题
- ¥15 素材场景中光线烘焙后灯光失效
- ¥15 请教一下各位,为什么我这个没有实现模拟点击
- ¥15 执行 virtuoso 命令后,界面没有,cadence 启动不起来
- ¥50 comfyui下连接animatediff节点生成视频质量非常差的原因
- ¥20 有关区间dp的问题求解
- ¥15 多电路系统共用电源的串扰问题
- ¥15 slam rangenet++配置
- ¥15 有没有研究水声通信方面的帮我改俩matlab代码
- ¥15 ubuntu子系统密码忘记
- ¥15 保护模式-系统加载-段寄存器