
最近我在用MPU9250做姿态解算,用的网上的mahony算法,但是其中有个halft,注释说是姿态解算速度的一半,但是我不知道这个姿态解算速度该怎么测,我是把原始数据读取出来后上传给matlab进行处理的,我的想法是在每次进行九轴数据融合的时候把这次的时间与上次融合的时间相减得到这个姿态解算速度的,不知道这样是否可行,如果不行的话,应该怎么设置固定的姿态解算速度。
这是网上找的算法的说明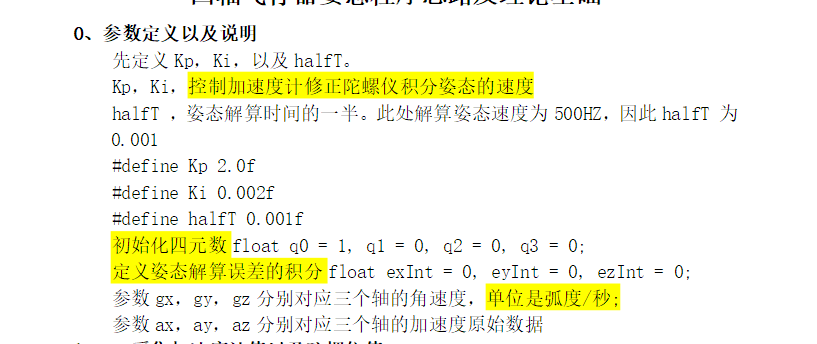
这是我matlab上做法
t2=clock;
halft=(t2-t1)/2;
[pitch,roll,yaw]=ninefusion(data);
t1=clock;








