1.单输入单输出情况的推导;2.两输入两输出情况的推导,并进行matlab仿真以及完成仿真报告。
求帮助 可以适量加钱😭

1.单输入单输出情况的推导;2.两输入两输出情况的推导,并进行matlab仿真以及完成仿真报告。
求帮助 可以适量加钱😭
 分享
分享
 关注
关注
- 单输入单输出情况的推导
针对单输入单输出的情况,我们可以将上述系统表示成如下形式:
$$y^{(k)} + a_1 y^{(k-1)} + a_2 y^{(k-2)} = u^{(k)} + b_1 u^{(k-1)} + b_2 u^{(k-2)} + w^{(k)}$$
其中,$$y^{(k)}$$ 是第k个时刻的输出,$$u^{(k)}$$ 是第k个时刻的输入,$$w^{(k)}$$ 是第k个时刻的随机噪声。$$a_1,a_2,b_1,b_2$$ 是待辨识参数。
为了进行最小二乘辨识,我们需要采集N组数据 $$(u^{(k)},y^{(k)})$$,并构造如下矩阵和向量:
$$
\begin{aligned}
Y &= \begin{bmatrix}
y^{(2)} & y^{(1)} \
y^{(3)} & y^{(2)} \
\vdots & \vdots \
y^{(N)} & y^{(N-1)}
\end{bmatrix},
&X &= \begin{bmatrix}
y^{(1)} & u^{(1)} & y^{(0)} & u^{(0)} \
y^{(2)} & u^{(2)} & y^{(1)} & u^{(1)} \
\vdots & \vdots & \vdots & \vdots \
y^{(N)} & u^{(N)} & y^{(N-1)} & u^{(N-1)}
\end{bmatrix},
&\theta &= \begin{bmatrix}
a_1 \ a_2 \ b_1 \ b_2
\end{bmatrix},
&\epsilon &= \begin{bmatrix}
w^{(2)} \ w^{(3)} \ \vdots \ w^{(N)}
\end{bmatrix}
\end{aligned}
$$
其中,$$Y$$ 代表输出矩阵,每行为相邻时刻的输出;$$X$$ 代表设计矩阵,每行为相邻时刻的输入和输出;$$\theta$$ 是参数向量,$$\epsilon$$ 是噪声向量。
带入式子,得到:
$$Y = X\theta+\epsilon$$
最小二乘求解参数向量 $$\theta$$ 的方法为:
$$\theta = (X^TX)^{-1}X^TY$$
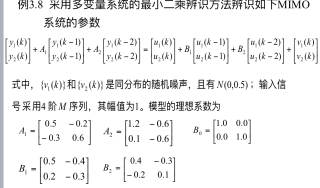
- 两输入两输出情况的推导
针对两输入两输出的情况,我们可以将上述系统表示成如下形式:
$$
\begin{aligned}
y_1^{(k)} + a_{11}y_1^{(k-1)}+a_{12}y_1^{(k-2)}+a_{21}y_2^{(k-1)}+a_{22}y_2^{(k-2)} &= u_1^{(k)}+b_{11}u_1^{(k-1)}+b_{12}u_1^{(k-2)}+b_{21}u_2^{(k-1)}+b_{22}u_2^{(k-2)}+w_1^{(k)} \
y_2^{(k)} + a_{11}y_2^{(k-1)}+a_{12}y_2^{(k-2)}+a_{21}y_1^{(k-1)}+a_{22}y_1^{(k-2)} &= u_2^{(k)}+b_{21}u_1^{(k-1)}+b_{22}u_2^{(k-2)}+b_{11}u_1^{(k)}+b_{12}u_2^{(k-1)}+w_2^{(k)}
\end{aligned}
$$
其中, $$y_1^{(k)},y_2^{(k)}$$ 分别是第k个时刻的两个输出, $$u_1^{(k)},u_2^{(k)}$$ 分别是第k个时刻的两个输入, $$w_1^{(k)},w_2^{(k)}$$ 分别是第k个时刻的两个随机噪声。 $$a_{11},a_{12},a_{21},a_{22},b_{11},b_{12},b_{21},b_{22}$$ 是待辨识参数。
为了进行最小二乘辨识,我们需要采集N组数据 $$(u_1^{(k)},u_2^{(k)},y_1^{(k)},y_2^{(k)})$$ ,并构造如下矩阵和向量:
$$
\begin{aligned}
Y &= \begin{bmatrix}
y^{(2)} & y^{(1)} \
y^{(3)} & y^{(2)} \
\vdots & \vdots \
y^{(N)} & y^{(N-1)}
\end{bmatrix},
&X &= \begin{bmatrix}
y_1^{(1)} & u_1^{(1)} & y_2^{(1)} & u_2^{(1)} & y_1^{(0)} & u_1^{(0)} & y_2^{(0)} & u_2^{(0)} \
y_1^{(2)} & u_1^{(2)} & y_2^{(2)} & u_2^{(2)} & y_1^{(1)} & u_1^{(1)} & y_2^{(1)} & u_2^{(1)} \
\vdots & \vdots & \vdots & \vdots & \vdots & \vdots & \vdots & \vdots \
y_1^{(N)} & u_1^{(N)} & y_2^{(N)} & u_2^{(N)} & y_1^{(N-1)} & u_1^{(N-1)} & y_2^{(N-1)} & u_2^{(N-1)}
\end{bmatrix},
&\theta &= \begin{bmatrix}
a_{11} \ a_{12} \ a_{21} \ a_{22} \ b_{11} \ b_{12} \ b_{21} \ b_{22}
\end{bmatrix},
&\epsilon &= \begin{bmatrix}
w_1^{(2)} \ w_2^{(2)} \ w_1^{(3)} \ w_2^{(3)} \ \vdots \ w_1^{(N)} \ w_2^{(N)}
\end{bmatrix}
\end{aligned}
$$
其中,$$Y$$ 代表输出矩阵,每行为相邻时刻的输出; $$X$$ 代表设计矩阵,每行为相邻时刻的输入和输出;$$\theta$$ 是参数向量, $$\epsilon$$ 是噪声向量。
带入式子,得到:
$$Y = X\theta+\epsilon$$
最小二乘求解参数向量 $$\theta$$ 的方法与单输入单输出情况类似。
你看下是这样不
分享 系统已结题
6月11日
系统已结题
6月11日 创建了问题
6月3日
创建了问题
6月3日

