
事实上,我认为ros激光雷达数据结构应该是这样的: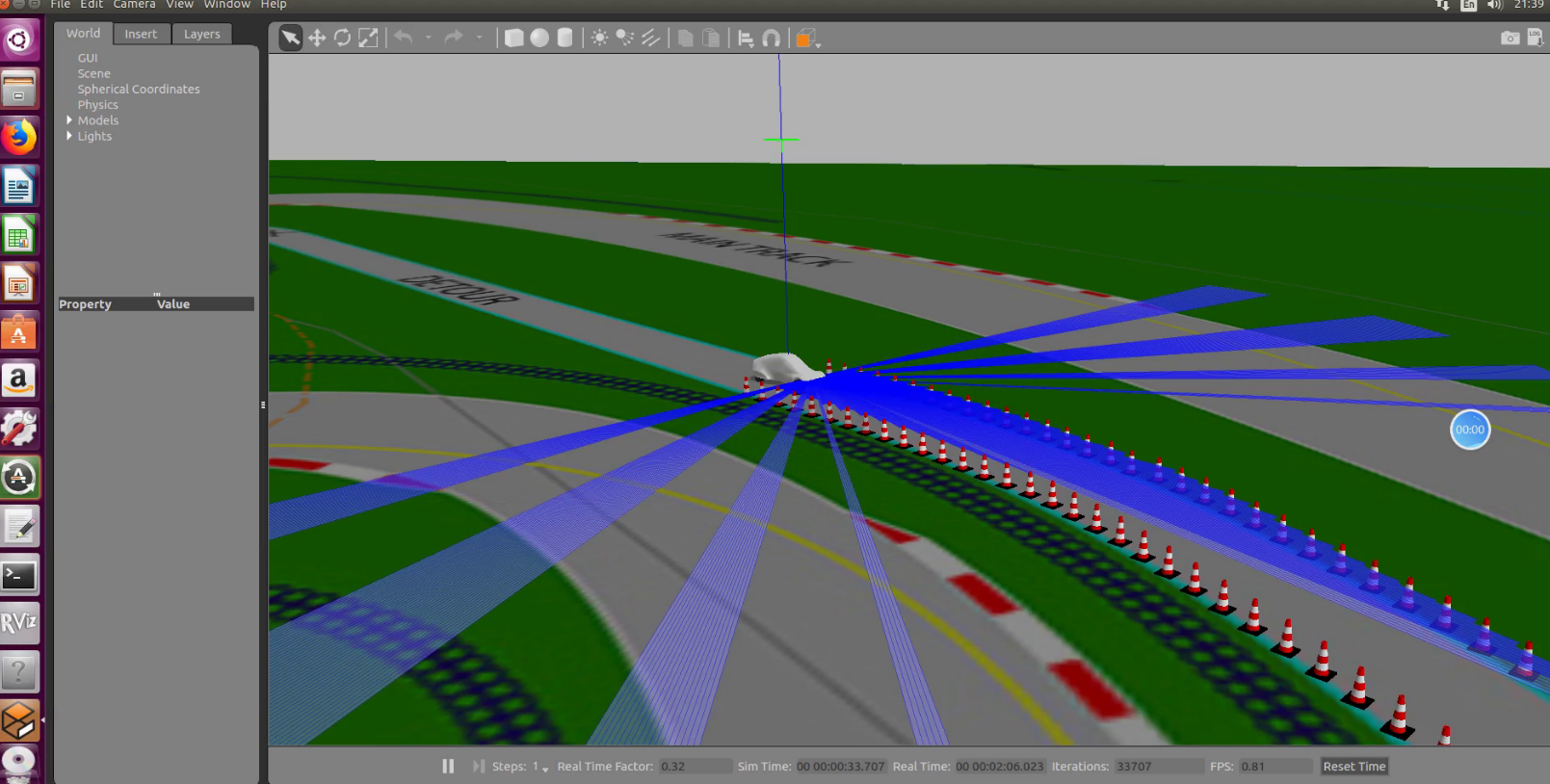
原始数据格式(但这里似乎最大上限应该是30m,为什么没有出现呢?):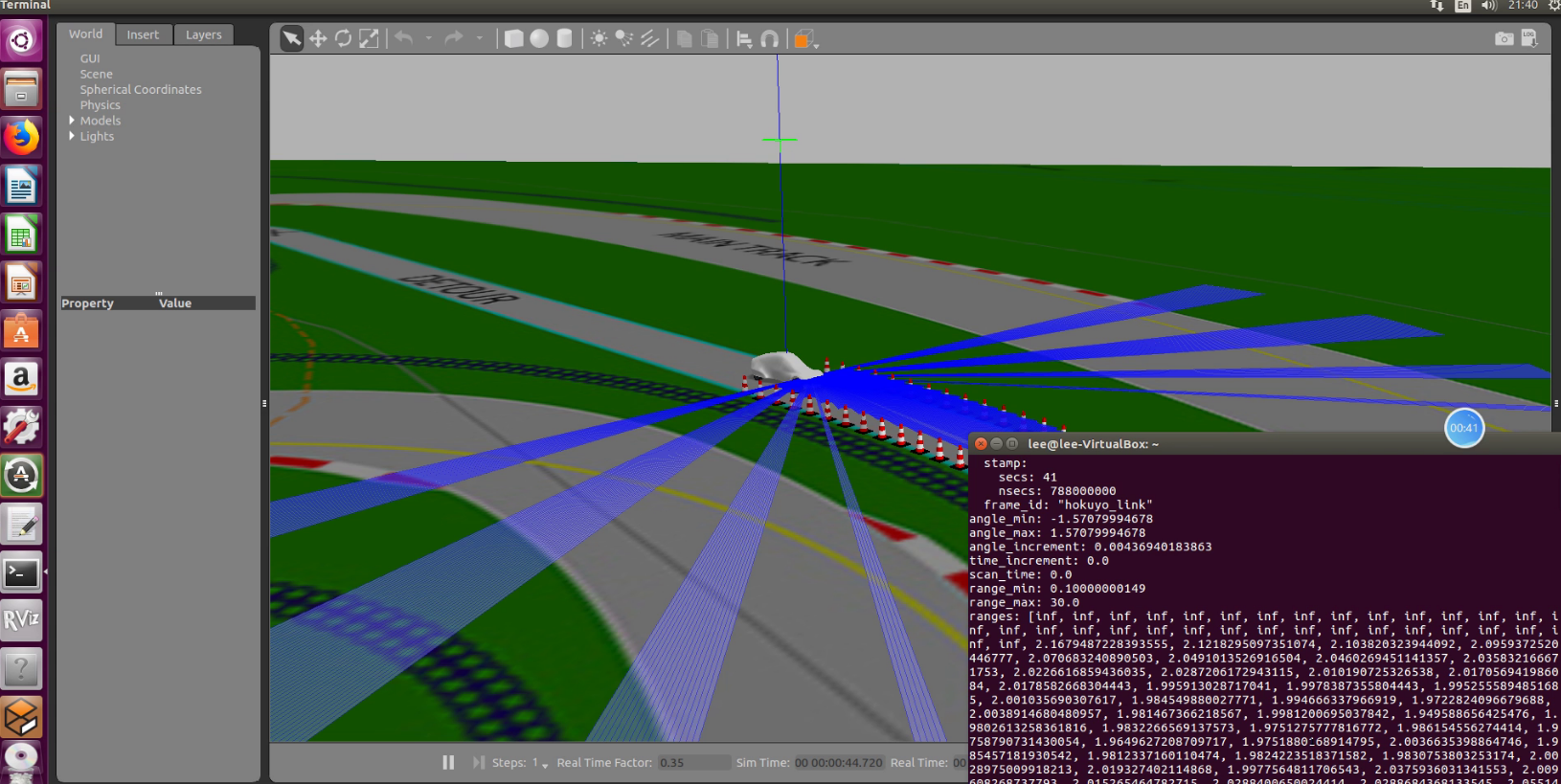
但是我在gazebo上运行激光雷达获得的数据如下,可以看到ranges列数据非常小且不符合实际,就好像是被一个圈围住了一样。

我的雷达格式设定如下:
<gazebo reference="hokuyo_link">
<sensor type="ray" name="head_hokuyo_sensor">
<pose>0 0 0 0 0 0</pose>
<visualize>true</visualize>
<update_rate>60</update_rate>
<ray>
<scan>
<horizontal>
<samples>180</samples>
<resolution>1</resolution>
<min_angle>-1.570796</min_angle>
<max_angle>1.570796</max_angle>
</horizontal>
</scan>
<range>
<min>0</min>
<max>10.0</max>
<resolution>0.01</resolution>
</range>
<noise>
<type>gaussian</type>
<mean>0.0</mean>
<stddev>0.01</stddev>
</noise>
</ray>
<plugin name="gazebo_ros_head_hokuyo_controller" filename="libgazebo_ros_laser.so">
<topicName>/autonomous_car/laser/scan</topicName>
<frameName>hokuyo_link</frameName>
</plugin>
</sensor>
</gazebo>
请问这个问题该如何解决?感谢你的帮助,如果可以解决问题我会提高悬赏






