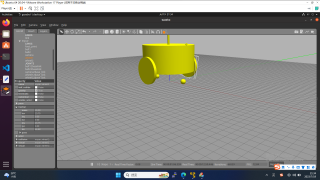
为什么我的gazebo模型小车,轮胎在转,但是车不动呢?2个轮胎都在动,但是车没动,

为什么我的gazebo模型小车,轮胎在转,但是车不动呢?2个轮胎都在动,但是车没动,
 分享
分享
 关注
关注一行指令搞定
nvidia-smi
问题原因分析:根据给出的问题描述,可能的原因有以下几种可能性: 1. 小车的轮子没有正确连接到车辆的底盘上,导致转动时没有对车辆产生推动力。 2. 小车的驱动电机没有正确连接到车辆的底盘上,导致电机转动时没有对车辆产生推动力。 3. 小车的模型在Gazebo中的碰撞和物理参数设置不正确,导致无法正确模拟车辆的运动力学。
解决方案: 1. 检查轮子和底盘的连接:首先,查看小车模型的设计文件,确保轮子正确连接到底盘。可以通过检查轮子和底盘的模型文件或查看Gazebo界面中的模型结构来确认。 2. 检查驱动电机的连接:查看小车模型的设计文件以及Gazebo中的控制器设置,确保驱动电机正确连接到车辆底盘,并且在Gazebo中被正确地识别和控制。 3. 调整模型的物理参数:在Gazebo中,模型的物理参数对于模拟真实的运动是非常重要的。检查小车模型在Gazebo中的碰撞参数、摩擦参数、质量参数等,确保它们与实际情况相匹配。可以使用Gazebo提供的插件来设置模型的物理参数。 4. 检查模型和世界的尺度设置:在Gazebo中,模型和世界的尺度设置也会影响到模拟的运动。确保模型和世界的尺度设置正确,以避免由于尺度不匹配而导致的错误模拟结果。
如果以上解决方案都不能解决问题,可能需要更详细地查看Gazebo日志和调试信息来确定导致该问题的具体原因。
分享 已结题
(查看结题原因) 7月28日
创建了问题
7月19日
已结题
(查看结题原因) 7月28日
创建了问题
7月19日



