[rosrun] Couldn't find executable named helloworld_p below /home/ming/demo01_Ws/src/helloworld报错如何解决

并且在同一个包下面只有py文件会有这种问题c++文件是没有出现这种问题的


[rosrun] Couldn't find executable named helloworld_p below /home/ming/demo01_Ws/src/helloworld报错如何解决
 分享
分享 分享
分享 执行which helloworld_p命令为
且使用echo $PYTHONPATH命令的结果为
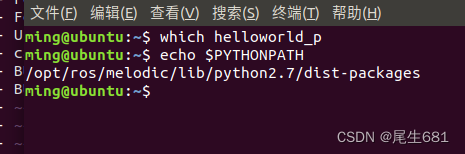
并且在/home/ming/demo01_Ws/devel/lib文件夹下并没有/python2.7/dist-packages
 rosserial_arduino连接报错ImportError: No module named queue,如何解决?(语言-python|操作系统-ubuntu)
python
ubuntu
有问必答
rosserial_arduino连接报错ImportError: No module named queue,如何解决?(语言-python|操作系统-ubuntu)
python
ubuntu
有问必答
 系统已结题
3月25日
系统已结题
3月25日 已采纳回答
3月18日
创建了问题
3月18日
已采纳回答
3月18日
创建了问题
3月18日











