传统的bounding boxes是水平的,也就是正方形,(x y w h)怎么做成有方向的oriented bounding boxes (x1 y1 x2 y2 x3 y3 x4 y4)。
或者有没有这种有方向的bounding boxes目标检测算法,求大佬解答
类似下图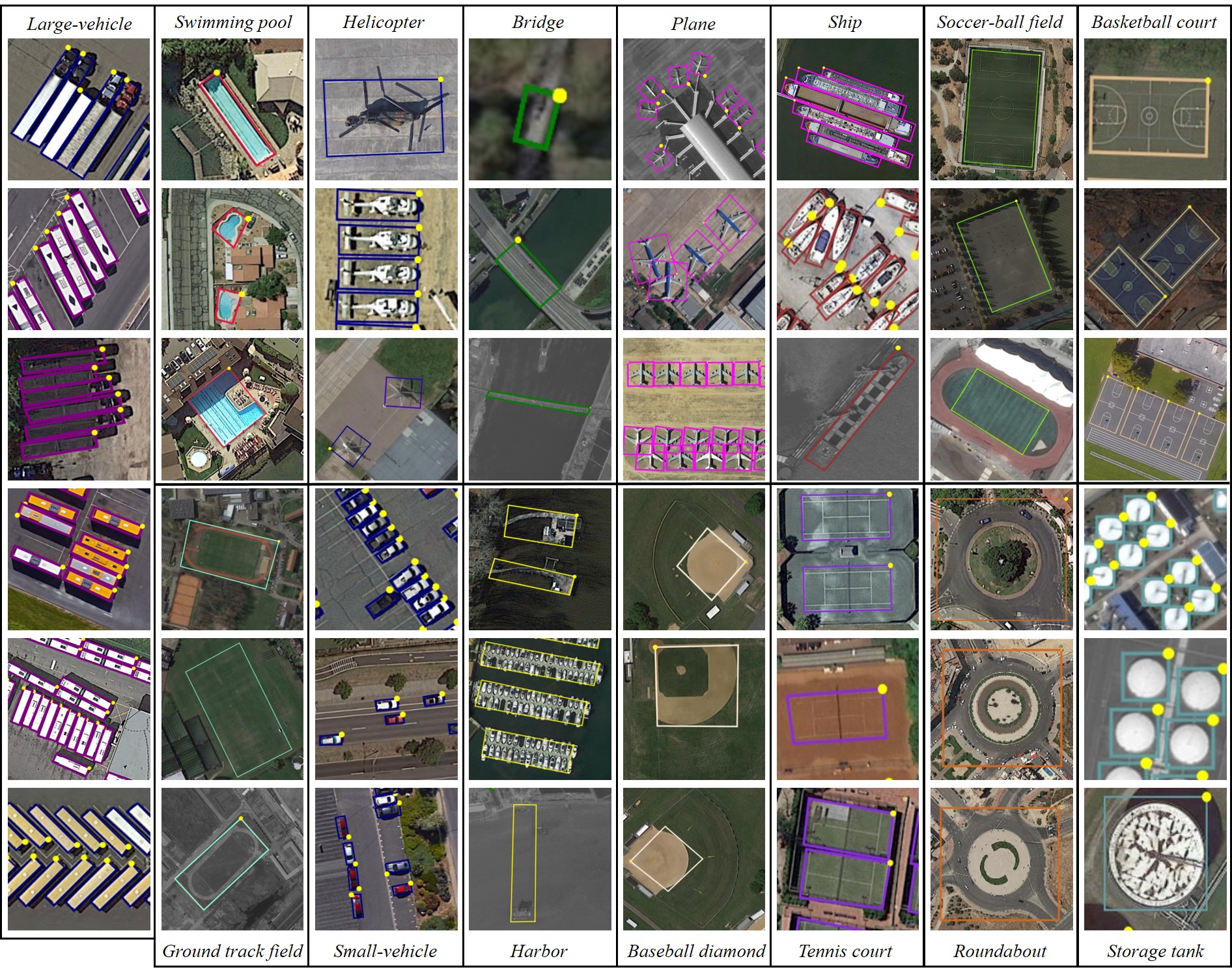

faster-rcnn的bounding boxes是否可以改进啊

- 写回答
- 好问题 0 提建议
- 关注问题
 分享
分享- 邀请回答
-

2条回答 默认 最新

- 2023-07-07 15:00算小法白的博客 (4条消息) 一文详解R-CNN、Fast R-CNN、Faster_faster rcnn参数量和模型大小_Hong_Youth的博客-CSDN博客。
- 2019-08-23 16:20lexi_qi的博客 CNN:****FAST-RCNN:****FASTER -RCNN:**整体架构:**网络结构**Conv layersRPN(Region Proposal Networks):ROI Pooling全连接层概念解释:**SPP-NET**IOUNMS**Bounding box regression**代码解读代码结构图数据准备*...
- 2025-02-16 17:02羅float的博客 利用VOC2007数据集,手撕faster-rcnn,了解双端目标检测网络的训练以及预测流程
- 2021-08-04 16:52MoYi_2020的博客 十分钟理解Faster-RCNN系列算法及相关算法详细原理 一、二阶段算法RCNN、Fast-RCNN、Faster-RCNN比较 1.R-CNN 实现过程 (1)region proposal。用区域合并算法SS(Selective Search for Object Recognition解读...
- 2020-04-28 14:52薪升贷农名工的博客 Girshick在2016年提出了新的Faster RCNN,在结构上,Faster RCNN已经将特征抽取(feature extraction),proposal提取,bounding box regression(rect refine),classification都整合在了一个网络中,使得综合性能有...
- 2022-03-17 00:19追梦AI的博客 Faster-RCNN是多阶段目标检测算法RCNN系列中的集大成者,下面来看看分别看看这个系列的算法细节。 ** **注:只简单讲解RCNN,Fast-RCNN算法。后面会重点讲解Fater-RCNN算法。 一、RCNN RCNN是2013年出现的目标检测...
- 2020-03-23 13:42yafee123的博客 通常在 Flag 立下之后的第一篇博客,总想把很多东西都放在一篇文章里面说得透透的,这样就像是在一个迷宫,越走发现可以走的路越多,所以往往就偏离主线越来越远,因此原计划就成了烂尾楼。 而解决拖延症的最好办法...
- 2021-11-01 15:56一农夫的博客 RPN网络首先经过3x3卷积,再分别生成positive anchors和对应bounding box regression偏移量,然后计算出proposals; 而Roi Pooling层则利用proposals从feature maps中提取proposal feature送入后续全连接和softmax...
- 2024-07-06 14:25布尔大学士的博客 Faster R-CNN是在Fast R-CNN的基础上进一步发展的,其核心贡献在于引入了RPN网络,实现了候选框(Region Proposal)的自动生成,从而替代了传统的Selective Search算法,大大提升了检测速度。Faster R-CNN通过共享...
- 2018-12-03 17:11sophia_xw的博客 转载链接:... Faster RCNN github : https://github.com/rbgirshick/py-faster-rcnn Faster RCNN paper : https://arxiv.org/abs/1506.01497 缩进经过RCNN和Fa...
- 没有解决我的问题, 去提问
