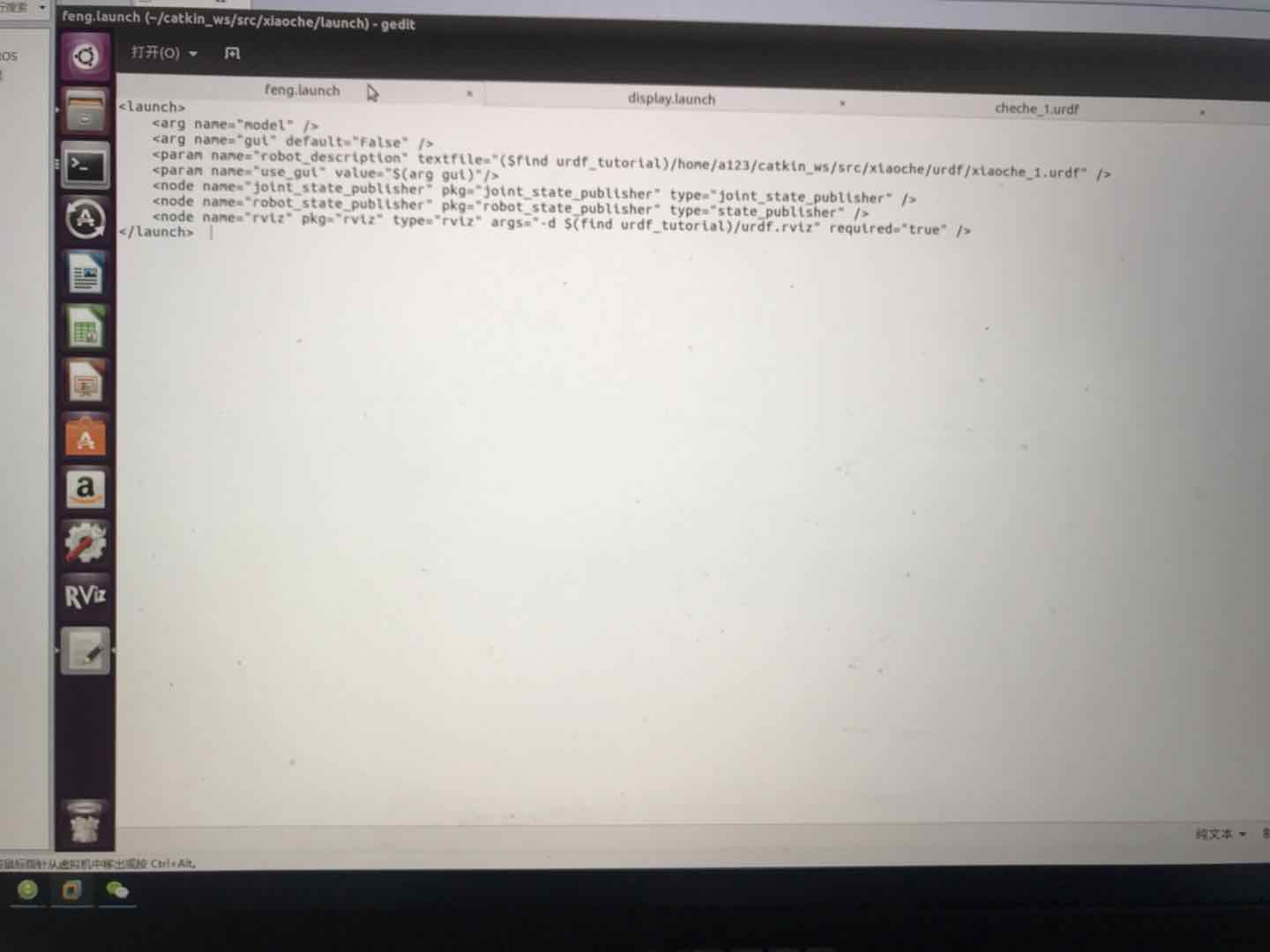
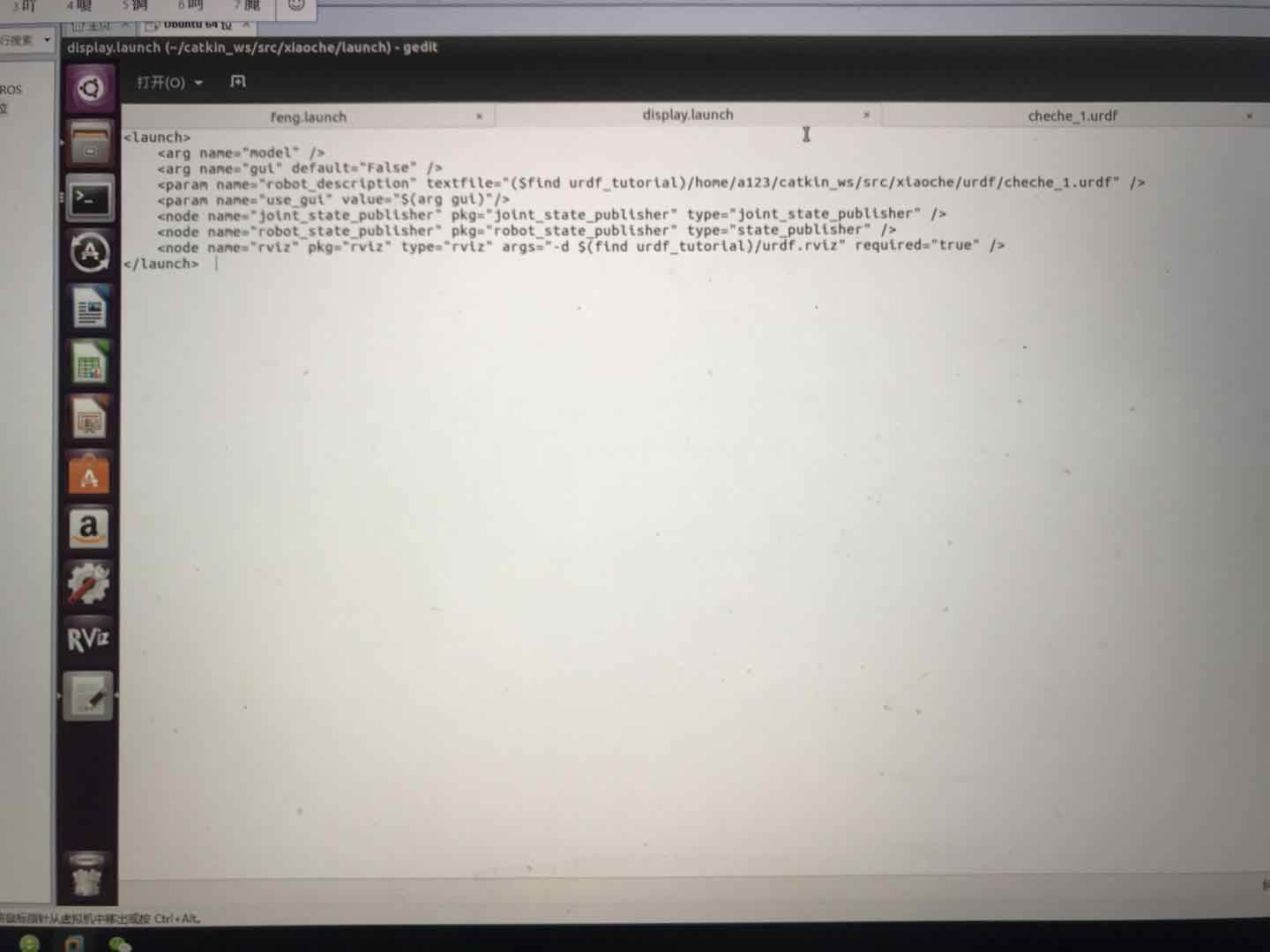
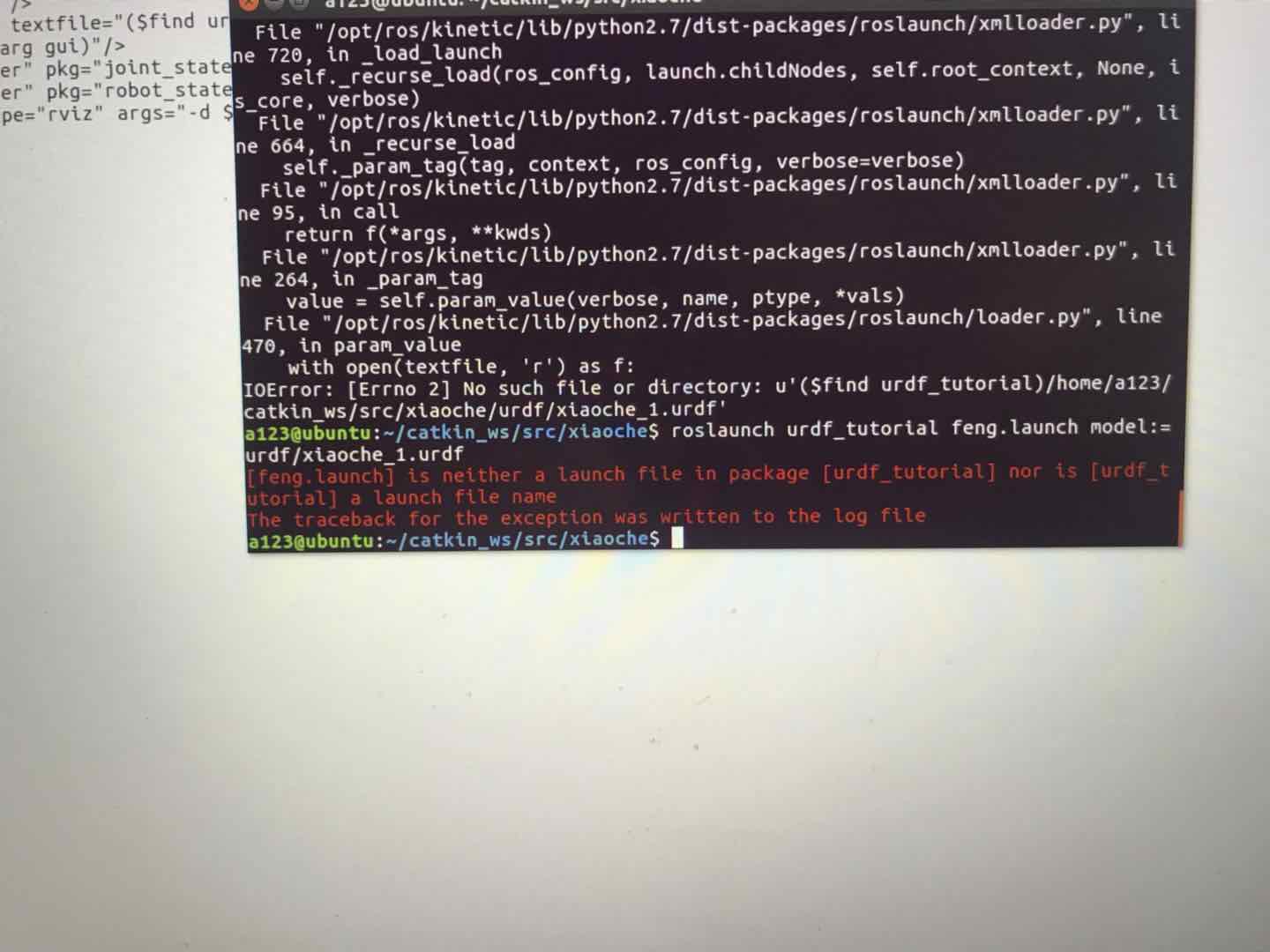
图上是我在同一个工作空间下创建的不同launch文件,但是一个可以启动,一个就会报错如图所示,请教一下大神们这是问什么,还有为什么可以运行launch的文件,text file=“(¥find urdf-tutorial)这并不是我urdf和launch文件所在的文件夹

请教ROS大神们一个问题

- 写回答
- 好问题 0 提建议
- 追加酬金
- 关注问题
 分享
分享- 邀请回答
-


0条回答 默认 最新
- 2017-11-30 02:16回答 3 已采纳 msg.angular.z=2*double(rand())/double(RAND_MAX)−1; 这句代码你是从pdf上粘贴过来的吧,问题在于最后的-1,前面的不是减号,可能被翻译成中文
- 2022-06-08 11:19回答 1 已采纳 可以参考:https://docs.elephantrobotics.com/docs/gitbook/13-AdvancedKit/13.5-%E5%9B%BE%E5%83%8F%E8%AF%86%
- 2022-01-26 10:33回答 1 已采纳 确实国内不好装ros 你可以看我博客 orbslam安装配置那一篇 是亲测最新的安装ros的方法
- 2020-07-02 08:43hant1216的博客 初学者学习ROS的一个很好的途径就是通过wiki教程来初步了解ros、安装ros、操作简单功能。了解后需要进阶学习可以参考各种开源项目,请教技术大牛博客大神等(可以参考古月居博客) 。 wiki是初学者跳不开的学习过程...
- 2021-11-09 18:45回答 1 已采纳 catkin的工作空间中,必须的文件夹是src,不是你这里的scr,src是source的缩写。
- 2022-01-27 10:03回答 1 已采纳 就是要source一下工作空间的setup.bash文件,不然找不到你的ros节点。因为每次都要source一下,要是觉得麻烦,可以把这行命令写到~/.bashrc文件的最下面
- 2021-06-26 15:34回答 2 已采纳 #include "ros/ros.h"#include <geometry_msgs/Twist.h> int main(int argc, char *argv[]){ doub
- 2018-10-20 17:14quickbrain的博客 距离发布上一篇ROS的博客已经过去两年了,才发现原来自己已经这么久可没有写过关于ROS的文章,想来很是惭愧。这两年时间,自己怀着程序员的梦想,研究过RTOS,探索过Linux,编写过Android应用,玩过web站点,但是...
- 2022-07-21 17:46回答 1 已采纳 dpkg出现问题cd /var/lib/dpkg/sudo mv info/ info_bak # 现将info文件夹更名sudo mkdir info
- 2023-04-06 16:11回答 1 已采纳 不知道你这个问题是否已经解决, 如果还没有解决的话: 这篇博客: ROS2 用Clion调试C++程序要点(包括Could NOT find FastRTPS 的解决方案)中的 摘要 部分也许能够解决
- 2023-03-02 15:52回答 2 已采纳 小魔女参考了bing和GPT部分内容调写:要实现你想要的智能移动小车,除了上面清单中的设备外,还需要购买IMU(惯性测量单元),用于提供机器人的姿态信息,以及激光雷达,用于提供机器人周围环境的距离信息
- 2018-03-14 18:17kiomi_kiomi的博客 今天我去实验室找师兄请教了,实在自己是搞不定了,我一个学自动化专业的,连让小车自己动都做不到,感觉好丢人… 开玩笑开玩笑… 第四次笔记,也是能驱动真实小车的第一次笔记,之前在小车WiFi配置上下了一番功夫...
- 2023-03-07 10:14回答 2 已采纳 这个配置sudo gedit /etc/default/grub里面的内容:GRUB_DEFAULT改为0 GRUB_DEFAULT=0 # sudo update-gru ```b 再更新一
- 2018-08-09 15:12大吉机器人的博客 距离发布上一篇ROS的博客已经过去两年了,才发现原来自己已经这么久可没有写过关于ROS的文章,想来很是惭愧。这两年时间,自己怀着程序员的梦想,研究过RTOS,探索过Linux,编写过Android应用,玩过web站点,但是...
- 2020-10-09 20:22笑一个吧(*^_^*)的博客 大疆技术总监:如何用六年成为一个全能的机器人工程师 机器人学的核心问题是做好和物理世界的交互。现在主流的机器人学分支里,...这类的问题似乎还没有一个最全面的答案。在机器人成为热门话题的当下,作为大学生
- 没有解决我的问题, 去提问


悬赏问题
- ¥15 素材场景中光线烘焙后灯光失效
- ¥15 请教一下各位,为什么我这个没有实现模拟点击
- ¥15 执行 virtuoso 命令后,界面没有,cadence 启动不起来
- ¥50 comfyui下连接animatediff节点生成视频质量非常差的原因
- ¥20 有关区间dp的问题求解
- ¥15 多电路系统共用电源的串扰问题
- ¥15 slam rangenet++配置
- ¥15 有没有研究水声通信方面的帮我改俩matlab代码
- ¥15 ubuntu子系统密码忘记
- ¥15 保护模式-系统加载-段寄存器