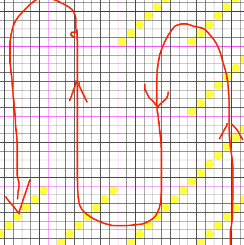
如果运动轨迹是随意的如图
sensor测量得到数据
这个X(k) ,X(k-1)之间的这个状态方程应该怎么建立,假设是匀速运动的
X=[x y Vx Vy] ?建立一个x=x+Vx*delta(t) 这种最后也能收敛成 测量的曲线么?
请教一下,不太清楚
感谢!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!

如果运动轨迹是随意的如图
sensor测量得到数据
这个X(k) ,X(k-1)之间的这个状态方程应该怎么建立,假设是匀速运动的
X=[x y Vx Vy] ?建立一个x=x+Vx*delta(t) 这种最后也能收敛成 测量的曲线么?
请教一下,不太清楚
感谢!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
 分享
分享
 关注
关注让阿豪来帮你解答,本回答参考chatgpt3.5编写提供,如果还有疑问可以评论或留言问题描述: 建立一个匀速运动的状态方程,用于描述给定位置和速度信息来预测下一时刻的位置和速度。 解决方案: 假设运动的物体是匀速直线运动,则我们可以利用匀速直线运动的物理公式来建立状态方程: x(k) = x(k-1) + Vx(k-1)*delta(t) y(k) = y(k-1) + Vy(k-1)*delta(t) Vx(k) = Vx(k-1) Vy(k) = Vy(k-1) 其中,x(k)和y(k)表示物体在k时刻的位置,Vx(k)和Vy(k)表示物体在k时刻的速度,delta(t)表示两次测量之间的时间间隔。 这样,我们可以根据前一时刻的位置和速度信息来预测下一时刻的位置和速度信息。同时,我们需要根据sensor测量得到的数据来更新状态方程中的位置和速度信息。 例如,我们假设sensor测量的数据为:x(0) = 0, y(0) = 0, Vx(0) = 1, Vy(0) = 1。则利用上述状态方程,我们可以依次计算出t=delta(t)时刻物体的位置和速度: x(1) = 0 + 1*delta(t) = delta(t) y(1) = 0 + 1*delta(t) = delta(t) Vx(1) = 1 Vy(1) = 1 然后,我们可以利用这些位置和速度信息来进行下一时刻的预测。如果这些预测值与传感器测量的值比较接近,则说明我们的状态方程比较准确,能够描述物体的运动轨迹。 代码实现: 下面是用Python实现的简单例子,演示如何根据前一时刻的位置和速度信息来预测下一时刻的位置和速度信息:
# 假设delta(t) = 1
delta_t = 1
# 初始化位置和速度信息
x = 0
y = 0
Vx = 1
Vy = 1
# 根据状态方程计算下一时刻的位置和速度信息
x_next = x + Vx*delta_t
y_next = y + Vy*delta_t
Vx_next = Vx
Vy_next = Vy
print("下一时刻的位置和速度信息为:")
print("x_next =", x_next)
print("y_next =", y_next)
print("Vx_next =", Vx_next)
print("Vy_next =", Vy_next)
输出结果为:
下一时刻的位置和速度信息为:
x_next = 1
y_next = 1
Vx_next = 1
Vy_next = 1
这表示,在时刻1(s)时,物体的位置为(1,1),速度为(1,1)。
分享


