引自免费微信小程序:皆我百晓生
针对您遇到的ROS小车路径规划实现不了的问题,以及终端中出现的警告信息,我将为您提供一系列可能的解决方案。根据您的描述,您已经排除了分布式框架和IP地址设置的问题,因为小车可以正常发布里程计数据。接下来,我们将重点探讨与路径规划相关的配置与参数调整。
1. 调整move_base节点参数
您提到已尝试调整move_base.launch中的controller_frequency和controller_patience参数,但仍然收到警告。这些参数确实会影响控制器的性能,但似乎并未完全解决问题。请检查并尝试以下额外参数调整:
<!-- 在move_base节点的参数部分添加或调整以下参数 -->
<node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen">
<!-- ... 其他现有参数 ... -->
<!-- 可能需要降低局部规划器更新频率 -->
<param name="local_planner_frequency" value="5.0"/> <!-- 建议值为5.0,视硬件性能调整 -->
<!-- 可能需要增加旋转恢复行为的阈值 -->
<param name="clearing_rotation_threshold" value="0.¾"/> <!-- 建议值为0.5,视具体情况调整 -->
<!-- 可能需要增加旋转恢复行为的最大旋转角度 -->
<param name="max_rotational_vel" value="0.5"/> <!-- 建议值为0.5,视具体机器人调整 -->
<!-- ... 其他现有参数 ... -->
</node>
2. 检查传感器数据更新频率
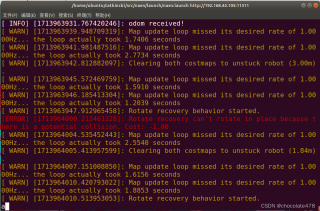
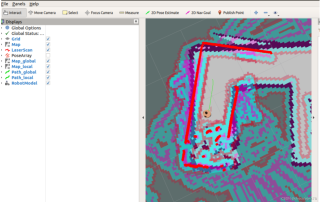
警告信息表明地图更新循环错过了期望的1Hz速率,这可能是由于传感器数据(如激光雷达)更新过慢导致的。请确保您的传感器数据发布频率足够高,且无明显延迟。可以在rviz中查看LaserScan数据更新情况,确保其流畅且无间断。
3. 调整costmap_2d参数
警告中还涉及到了清除成本地图以解救被困机器人的情况,这可能与成本地图参数设置有关。请检查并尝试调整costmap_common_params.yaml或相关配置文件中的以下参数:
# 可能需要降低静态层更新频率
static_map_update_frequency: 2.0 # 建议值为2.0,视具体需求调整
# 可能需要增加观测缓冲区大小
obstacle_layer:
observation_persistence: 0.5 # 建议值为0.5,视具体环境调整
# 可能需要降低 inflation_layer 更新频率
inflation_layer:
update_frequency: 2.0 # 建议值为2.0,视具体需求调整
4. 检查rotate_recovery行为配置
警告显示rotate_recovery行为启动且无法原地旋转,可能存在碰撞风险。请检查rotate_recovery插件的相关参数,确保其在遇到障碍时能有效执行避障策略。通常位于rotate_recovery.xml或其他相关配置文件中:
<!-- 可能需要增大允许的最大旋转角度 -->
<param name="max_rot_theta" value="3.14" />
<!-- 可能需要减小最小旋转步长 -->
<param name="min_rotational_vel" value="0.1" />
5. 确保机器人模型、地图与实际环境匹配
确保您使用的机器人模型尺寸、质量属性与实际小车相符,地图准确反映了真实环境,且已正确加载到move_base节点中。在rviz中观察小车模型是否能顺利通过规划路径,以及地图上是否存在未被正确识别或标记的障碍物。
6. 优化系统资源分配
如果上述调整仍无法解决问题,可能是由于系统资源不足导致。检查树莓派的CPU、内存使用情况,确保为ROS节点预留足够的计算资源。可以考虑关闭不必要的后台进程,或调整move_base节点的CPU亲和性以利用多核优势。
综上所述,逐一排查并按照建议调整上述参数,应有助于解决您的ROS小车路径规划问题。在进行参数调整后,记得重启move_base节点及相关依赖服务,观察终端输出及rviz中路径规划效果的变化。如有任何特定参数调整后产生显著改善或新问题,请及时反馈以便进一步分析。