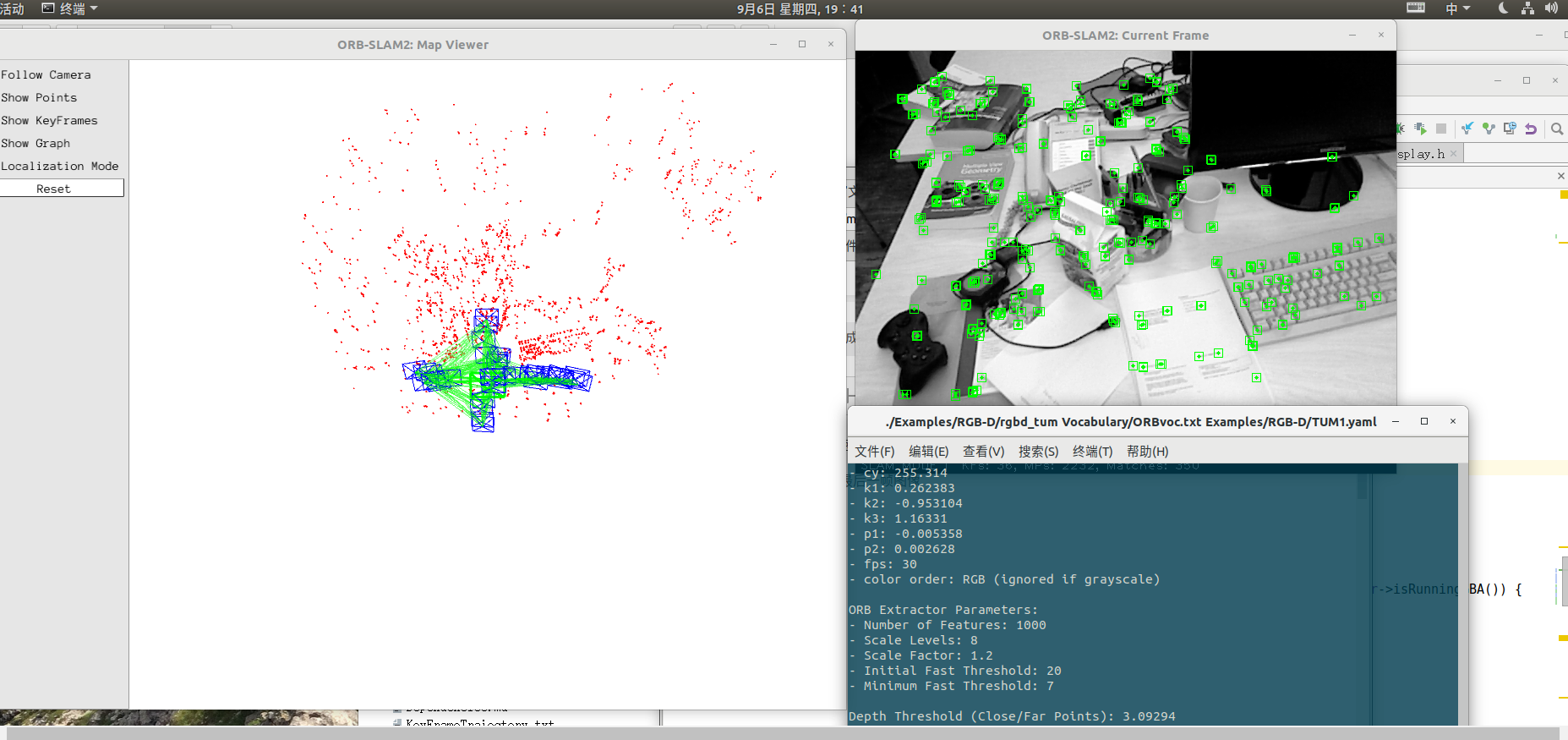
如图所示,这是别人的图片左侧有轨迹画面,我的只有右边的两个窗口,ORB-SLAM2:Map Viewer窗口没有任何画面,并且是卡死的,请问怎么回事?

SLAM ORB-SLAM2:Map Viewer画面不出现任何内容,卡死

- 写回答
- 好问题 0 提建议
- 追加酬金
- 关注问题
 分享
分享- 邀请回答
-


3条回答
 巴提斯塔 2021-05-26 09:11关注
巴提斯塔 2021-05-26 09:11关注我也碰到了同样的情况,在Pangolin/src/display/device/display_x11.cpp文件中,注释掉123和124这两行,将122行修改为GLX_DOUBLEBUFFER , glx_doublebuffer ? True : False,重新编译Pangolin就显示Map viewer了
评论 打赏解决 7无用举报 分享
- 2022-03-07 16:59回答 1 已采纳 Eigen库不同于一般的库,它只有头文件,没有.so和 .a那样的二进制库文件哪来的libEigen.so需要你-l ? CMakeLists.txt中添加 find_packa
- 2022-05-03 15:00回答 1 已采纳 我之前报类似错误是因为我系统里有两个liboost库 我删除了一个系统(好像是安装ros自动装的)自带的 就可以了 我感觉是某些库版本不兼容.. 源码没问题的
- 2018-07-14 03:45回答 3 已采纳 gdb OTB_SLAM2 core
- 2022-12-29 22:18APS2023的博客 ORBSLAM2跟踪线程解析
- 2020-07-04 22:25回答 1 已采纳 https://blog.csdn.net/felaim/article/details/79667635
- 2023-04-05 11:34回答 2 已采纳 这个错误提示是说在ROS中找不到名为ORB_SLAM2的包。这可能是因为你没有正确安装ORB_SLAM2包或者没有将其添加到ROS的环境变量中。 首先,你需要确保ORB_SLAM2包已经正确安装。你可
- 2022-03-15 17:05回答 2 已采纳 efk2 无法融合视觉信息且不断报错 requesting home position · Issue #I4YBV7 · 肖昆/XTDrone - Gitee.com
- 2023-01-04 10:07APS2023的博客 函数作用 为当前关键帧... // 取出所有连接的关键帧,mConnectedKeyFrameWeights的类型为std::map,而vPairs变量将共视的地图点数放在前面,利于排序 for(map::iterator mit=mConnectedKeyFrameWeights.begin(), mend=...
- 2022-10-15 22:18回答 1 已采纳 将1.png和2.png文件复制到当前文件夹中
- 2022-09-18 11:27回答 1 已采纳 globalMap是std::shared_prtr<PointCloud>类型,等号右边创建的是boost::shared_ptr<PointCloud>类型,两个类型不一样
- 2023-03-20 14:25回答 1 已采纳 该回答引用GPTᴼᴾᴱᴺᴬᴵ根据您提供的信息,可能有以下问题导致ORB_SLAM1在处理kitti数据集时出现跟踪失败的问题: 数据格式问题:kitti数据集提供的灰度图像数据可能与ORB_SLAM1
- 2023-05-12 11:02我才是一卓的博客 问题 如图,orb-slam3 运行的时候,Current Frame 窗口正常显示,但是 Map Viewer 窗口黑屏。 排查 检查源码,发现 Current Frame 窗口是 opencv::imshow 的,而 Map Viewer 窗口是 pangolin 库显示的。 检查 ...
- 2022-11-20 21:37回答 1 已采纳 warning而已
- 2020-04-05 15:23DenineLu的博客 在一切准备工作都做好后,运行TUM RGBD的任意一个序列时,发现在视频序列结束时,窗口就会灰屏卡住。通过debug发现是pangolin库的一个函数卡...我们进入SLAM.Shutdown函数,找到出现问题的语句 if(mpViewer){ pan...
- 2021-05-14 11:25ncepu_Chen的博客 ORB-SLAM2代码详解01: ORB-SLAM2代码运行流程运行官方Demo阅读代码之前你应该知道的事情变量命名规则理解多线程为什么要使用多线程?多线程中的锁SLAM主类`System`构造函数跟踪函数 运行官方Demo 以TUM数据集为例,...
- 没有解决我的问题, 去提问


悬赏问题
- ¥15 关于#matlab#的问题:期望的系统闭环传递函数为G(s)=wn^2/s^2+2¢wn+wn^2阻尼系数¢=0.707,使系统具有较小的超调量
- ¥15 FLUENT如何实现在堆积颗粒的上表面加载高斯热源
- ¥30 截图中的mathematics程序转换成matlab
- ¥15 动力学代码报错,维度不匹配
- ¥15 Power query添加列问题
- ¥50 Kubernetes&Fission&Eleasticsearch
- ¥15 報錯:Person is not mapped,如何解決?
- ¥15 c++头文件不能识别CDialog
- ¥15 Excel发现不可读取的内容
- ¥15 关于#stm32#的问题:CANOpen的PDO同步传输问题